@Cliff-Wong Thanks for your detailed guidance, helps a lot! #2 is actually what I was originally aiming to do, since I am actually doing simulation stuff with PX4 SITL so I can turn off GPS without consequences. Will try the other steps when we are ready to run it on hardware.
Allen Wu
@Allen Wu
Posts
-
Running VIO with GPS active -
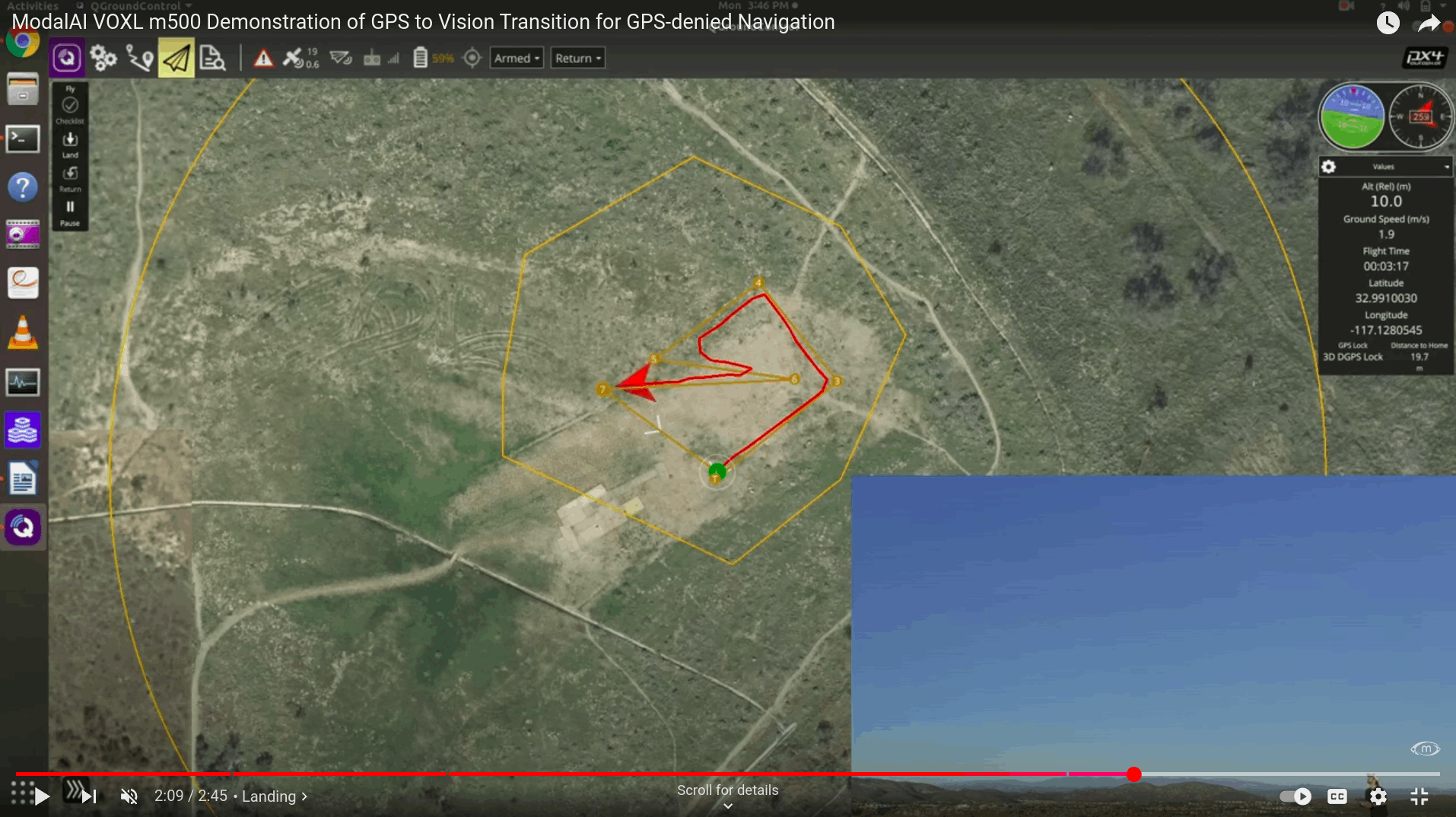
Running VIO with GPS activeHi all, I came across a VIO demo video on ModalAI's official youtube channel and found something interesting. The GPS was initially active, but was supposedly turned off with the command "gps stop" midway through the flight mission. However, the true GPS seems to remain active and recorded the actual trajectory of the VIO flight(the curly trajectory) even after "gps stop" was sent(see screenshot from the video below).
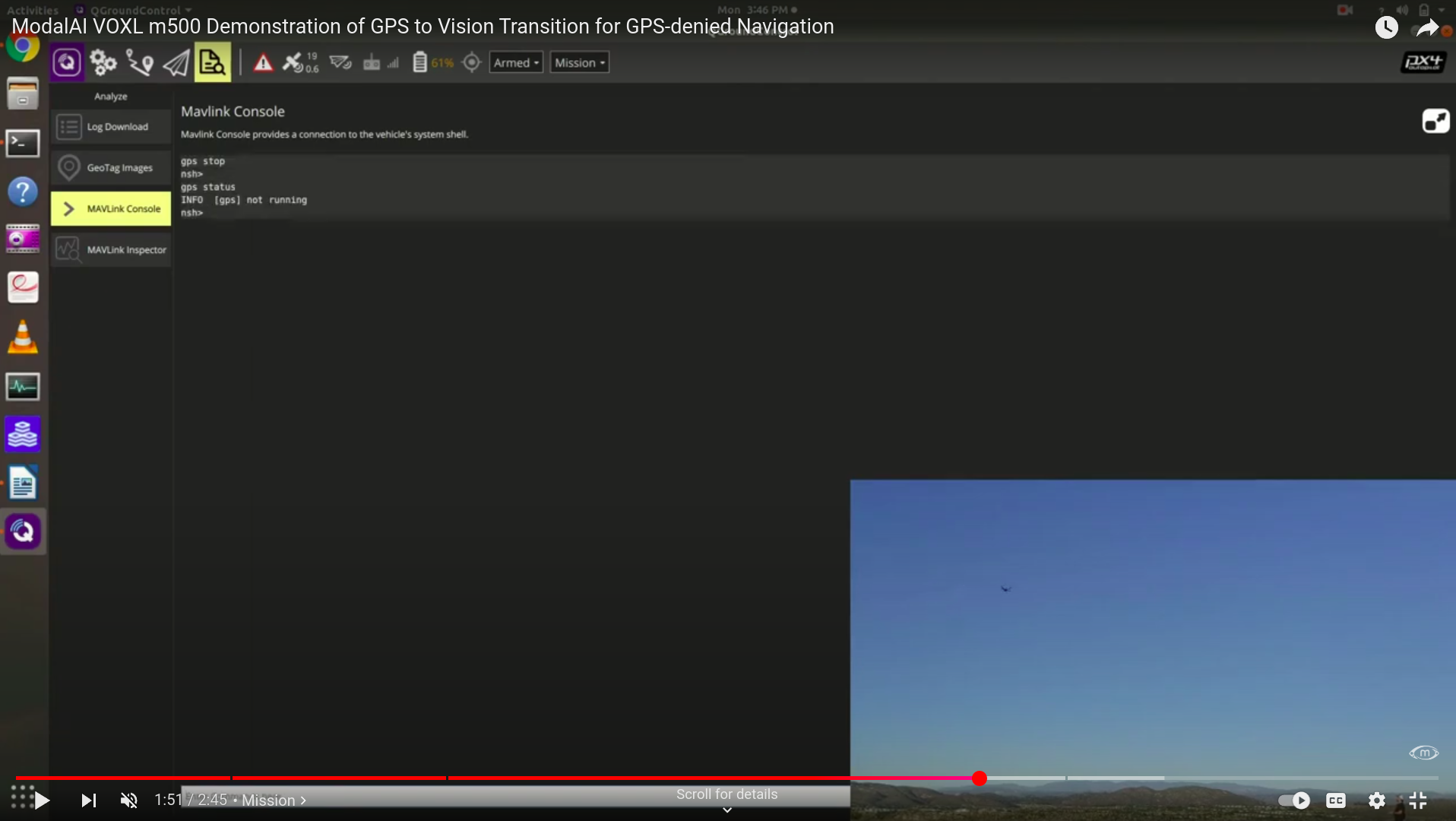
I've gone through the voxl-qvio-server source code, but I'm having trouble locating the implementation part of this —could anyone point me in the right direction? We are planning to test the VIO but would be better if we also have GPS on so we can use the geofence for safety purposes and also evaluate the performance with GPS as a groundtruth reference after testing.