Thanks Chad. We did the calibration again with a better calibration target, and this fixed the problem.
T
Best posts made by tomipi
-
RE: Unstable Seeker after flashingposted in Ask your questions right here!
Latest posts made by tomipi
-
RE: Taranis Q X7posted in Flight Core
We managed to solve this by connecting S.Port on R-XSR to J5 UART_4W_TX_3V3 and enabling FRSky (TELEM1) on QGC.
-
RE: Taranis Q X7posted in Flight Core
Hi @modaltb,
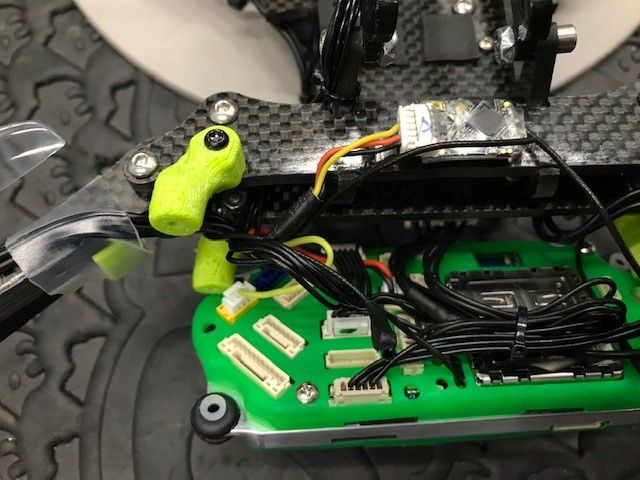
Actually, for the connector J12 only pin 3 (SBus RX) is connected to the SBUS_OUT of the receiver as shown in the picture below. There is no GND connection.
-
RE: Taranis Q X7posted in Flight Core
Hi,
Yes I believe that is correct, everything is factory installed.
Are you able to get the RC "input" into the system with this setup, and what you aren't getting is telemetry back?
Yes, everything else except the telemetry from the drone to the transmitter is working.
-
RE: Unstable Seeker after flashingposted in Ask your questions right here!
Thanks Chad. We did the calibration again with a better calibration target, and this fixed the problem.
-
RE: Taranis Q X7posted in Flight Core
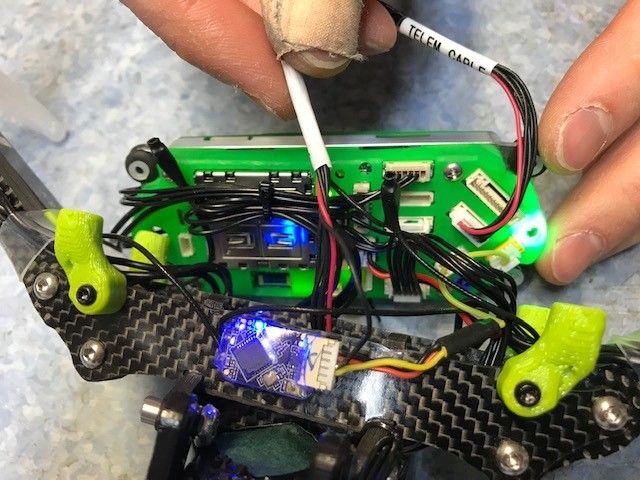
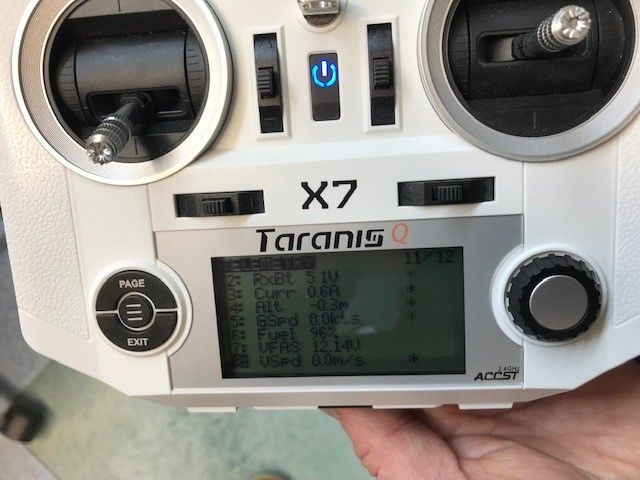
Our Seeker was ordered with the FrSky receiver and our transmitter is FrSky Taranis QX7 ACCST. The only telemetry we see at the moment is the receiver voltage. The telemetry works as expected over wifi between the drone and QGC.
On the receiver GND, +5V and SBUS_OUT/CPPM are connected. We can confirm that the mode is SBUS (the blued led is solid on the receiver).
How can we get the telemetry to our transmitter? Do we have to connect some extra cables, update the firmware or something else?
-
RE: Unstable Seeker after flashingposted in Ask your questions right here!
The drone is stable now after the factory reset.
However, the obstacle detection is not working. I have performed all the steps described in the collision preventation documentation. Running voxl-vision-px4 -s shows only 0s, and plotting obstacle detection values in QGC shows constant value of 800.
-
RE: Unstable Seeker after flashingposted in Ask your questions right here!
I believe configuring extrinsics solved most of the problems. However, the drone is till unstable. I believe, this is due to camera calibration issues. Could you send me the factory calibration files? The serial number is: M2100000ADF
-
Unstable Seeker after flashingposted in Ask your questions right here!
Hi,
After flashing Seeker with VOXL Platform Release version 3-3-0-0.5.0-a, the drone becomes unstable. For example:
- for voxl-inspect-qvio the state is often FALSE,
- in QGC, LOCAL_POSITION_NED is displaying 0 for x and y, and
- flight modes cannot be changed from manual.
I wonder if this platform version is compatible with Seeker.
Best regards,
Tomi -
RE: Taranis Q X7posted in Flight Core
Thanks for this. Unfortunately, I managed to set TEL_FRSKY_CONFIG to TELEM2 in QGroundControl and cannot form a connection between the drone and QGC anymore. Is this due to setting that parameter? How this can be fixed?