Hello all,
I have a Starling 2, and I was experiencing the same issue where the GPS would not get a fix. After some debugging, here’s how I managed to “solve” it.
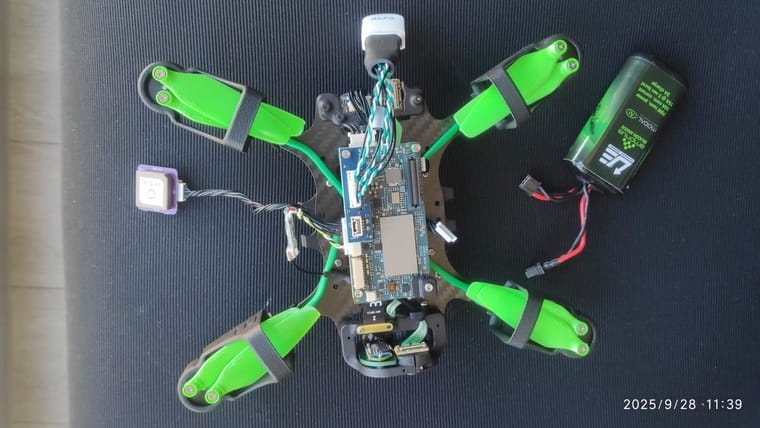
The root cause seems to be EMI. When placing the receiver as shown in the first image, I was able to reach ~40 dB signal strength, compared to only ~8 dB in the original location. I understand this is a development drone and that the design prioritizes robustness, so GPS placement is not straightforward.
I tried many of the suggestions mentioned in this and related threads, but the only two approaches that consistently improved signal strength enough to achieve a fix were:
- Increasing the distance between the GPS receiver and the rest of the electronics (some manufacturers recommend >10 cm).
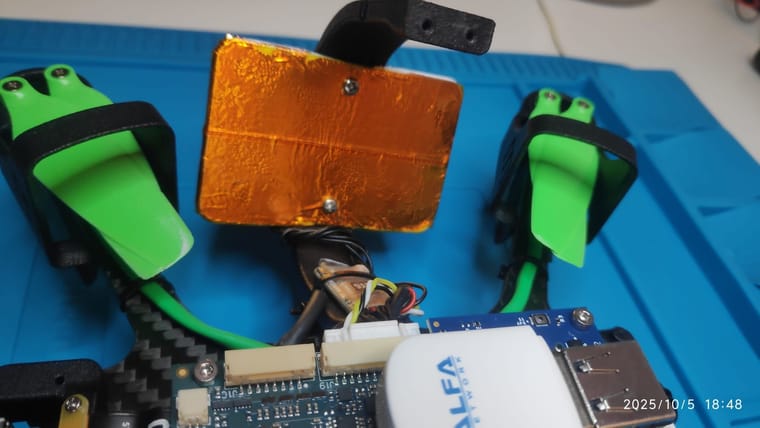
- Shielding the receiver.
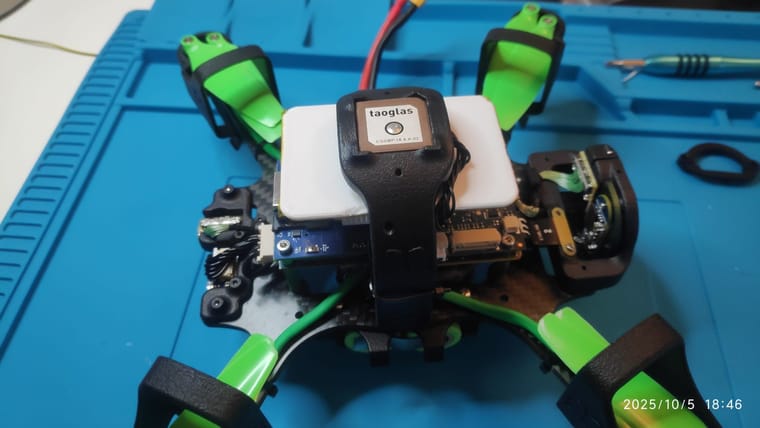
After experimenting with several designs, the setup shown below gave me ~30 dB signal strength while still allowing WiFi functionality, adequate cooling, and a compact profile that won’t break in case of a crash. For shielding, I used copper foil and Kapton tape (as an extra precaution).
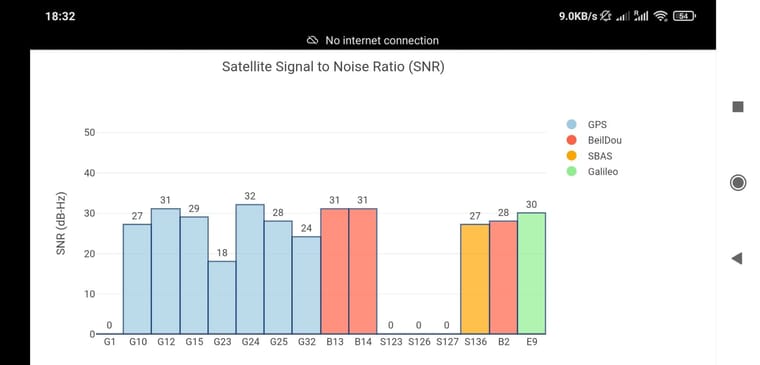
With this arrangement, I can now get a fix quickly and achieve about ~1.5 m HDOP.
I’m sharing the STL file here in case anyone else finds it useful. Hopefully it helps others experiencing the same issue!
https://cad.onshape.com/documents/09d5e2f9cd88026c26cc7f0f/w/477eee1375596be3c9e530ed/e/1fbd7ed82367117110cba263
The only downside is that the design isn’t exactly pretty—but I’m sure the ModalAI team will come up with a more elegant solution soon ")
https://forum.modalai.com/topic/3879/gps-not-working-for-starling-2-max
https://forum.modalai.com/topic/3912/problem-acquiring-gps-satellites-possible-voxl2-board-emi