Hi, we experienced an unexpected takeoff from the startling 2 Max. After flying a short hop to validate the GCS failsafe would trigger, we landed and then 40 seconds later the starling jumped up into the air unprompted.
Sequence of events:
- We flew the drone in position mode, forced a return to land by disabling the GCS (to see that the failsafe was behaving as intended) and then we let the drone land.
- The drone landed (visually) but never disarmed.
- It sat on the ground with 0 throttle from the pilot, but never disarmed.
- After 40 seconds, the starling 2 max shot up into the air 15 meters at max speed (with the throttle still down)
- The pilot took control in stabilised mode, landed the drone, disarmed and unplugged the battery.
- We have not flown since.
We were flying outdoors, with a 3D GPS fix ~25 satellites (we are now aware of the GPS EMI interference issues with the starling, which we believe has been causing us to have very poor altitude tracking +/-10 meters).
** Possible cause **
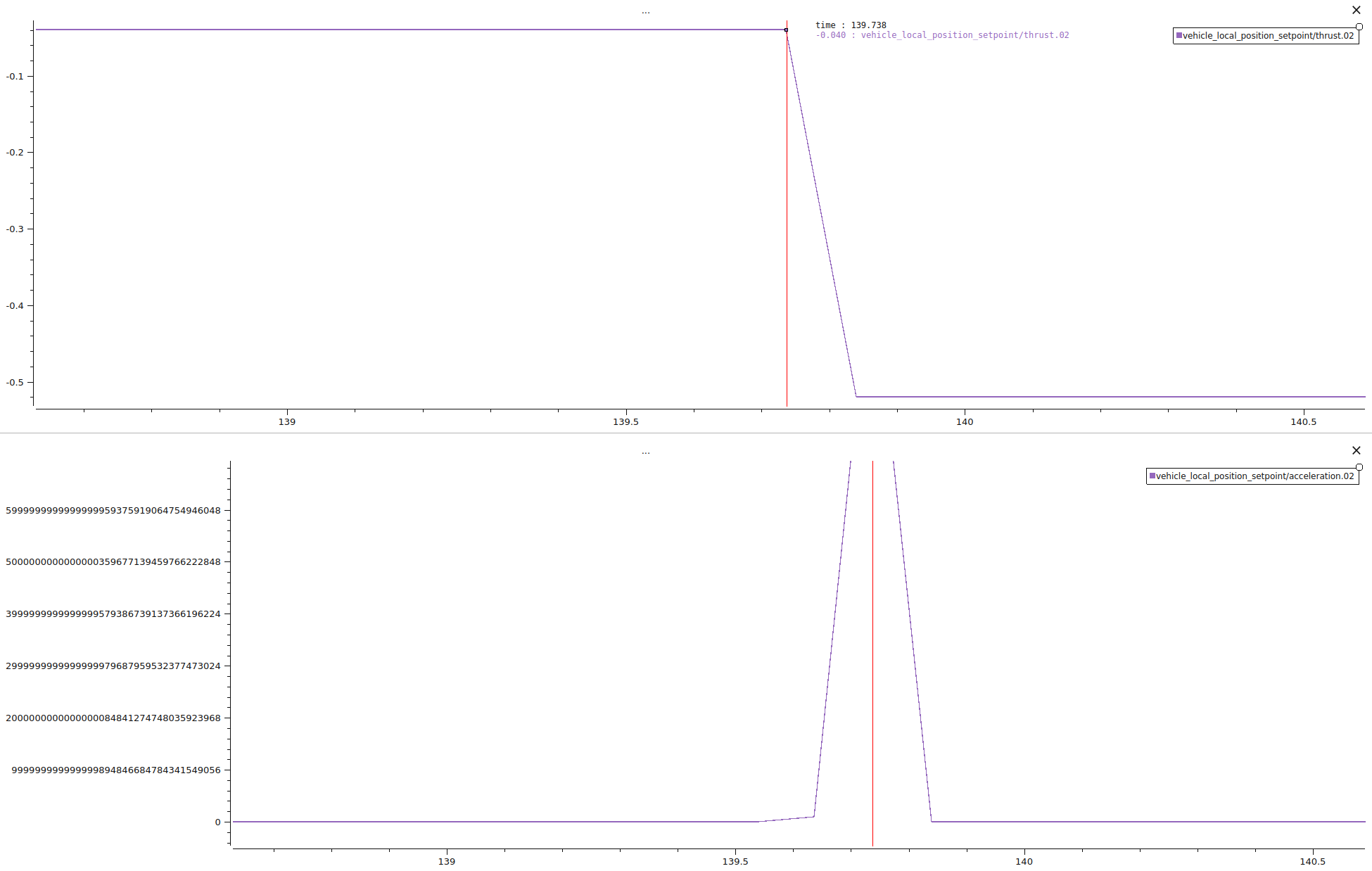
We noticed in the logs that the vehicle_local_position_setpoint/acceleration value increases from about 20 to a number so large it causes a floating-point overload, causing the acceleration to go negative.
At the point where the value goes negative, the propellers spin up full speed, and the drone jumps 15 meters.
The increase in value took place over about a second.
What is going on here?
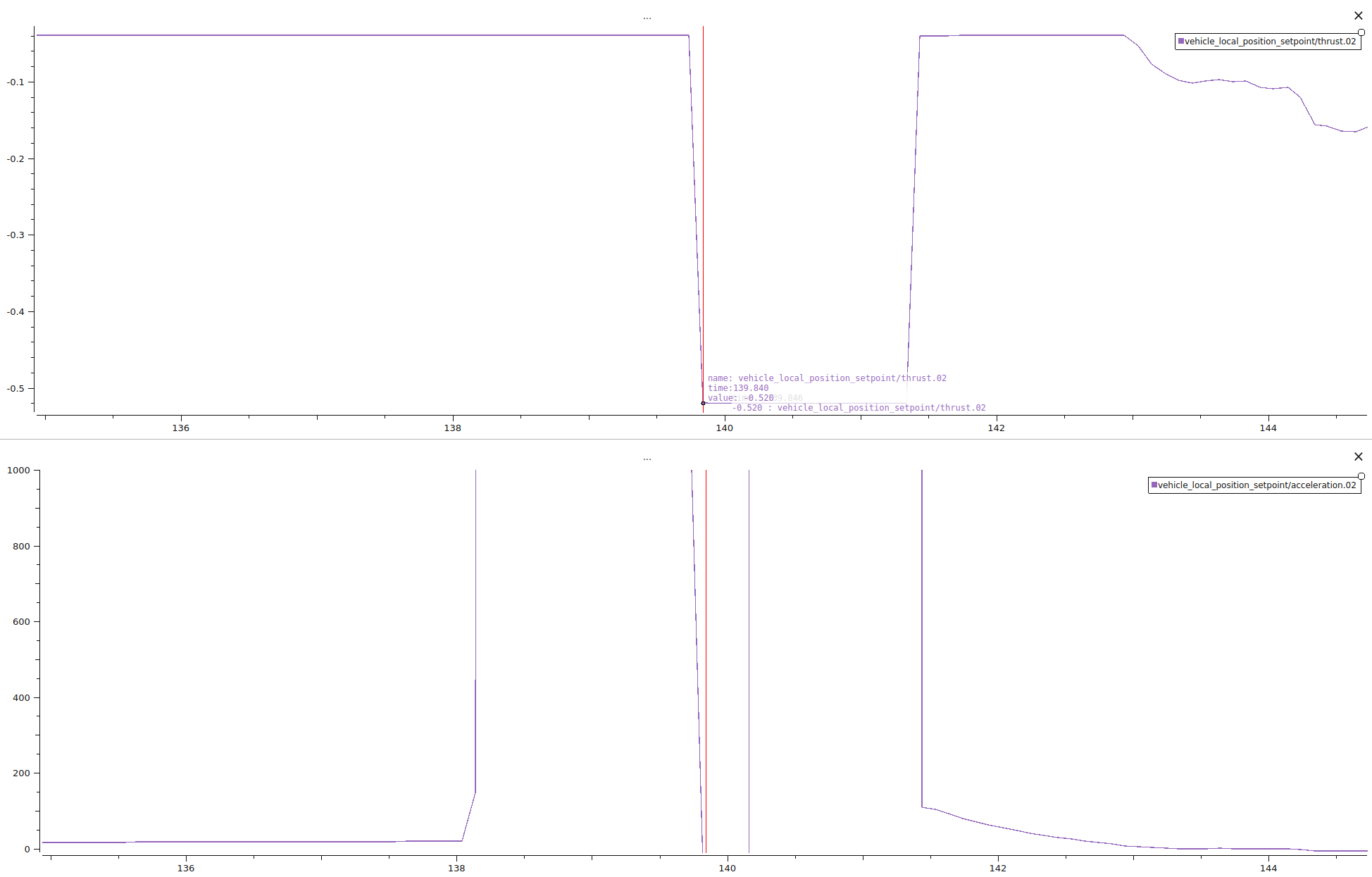
138.0s into the flight, the acceleration setpoint starts increasing rapidly.
At 139.7 seconds into the flight, the thrust starts increasing, which coincides with the acceleration setpoint overloading and flipping sign.
The event ends at about 141.5s into the flight, by that the time the drone is almost 15m into the air.
We do not know the root cause of the acceleration spike.
Questions:
- Why did the drone not land when it came to a stop on the ground with 0 throttle?
- Why is the acceleration unbounded? Has anyone seen this before? Are there known fixes in later versions of PX4?