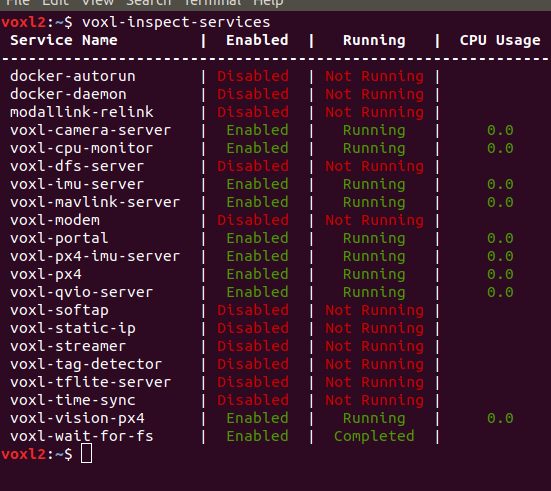
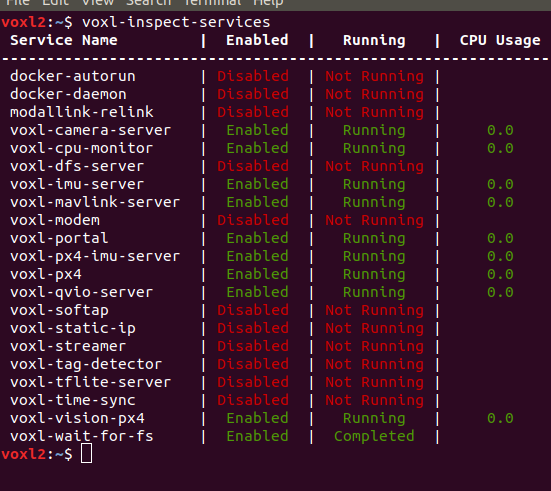
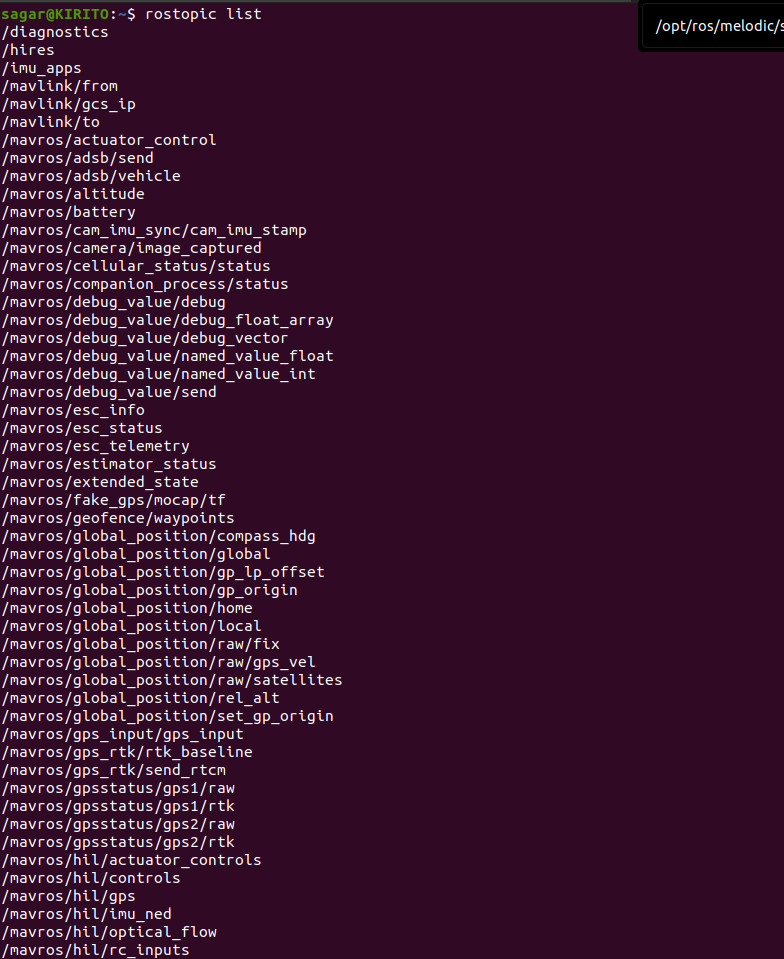
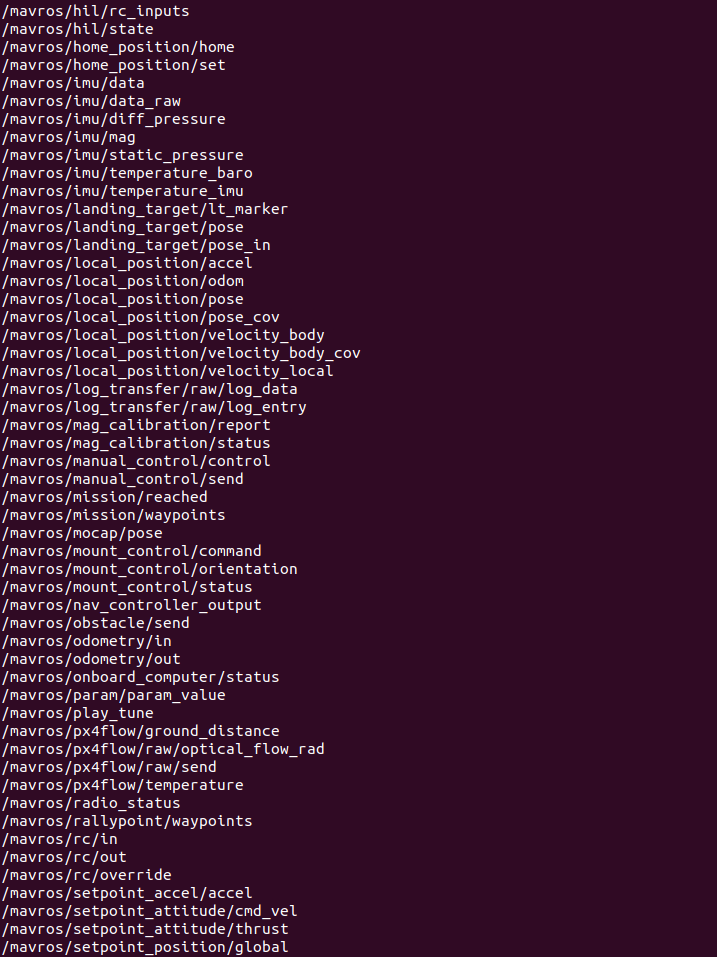
I am trying to modify the VIO algorithm. I was going through the PX4 documentation: Using Vision or Motion Capture Systems for Position Estimation. They mentioned that in order to add the VIO data in the EKF2, it needs to be published either in "/mavros/vision_pose/pose" or "/mavros/odometry/out". I launched the voxl_mpa_to_ros and px4 launch files, here is the all available rostopics:
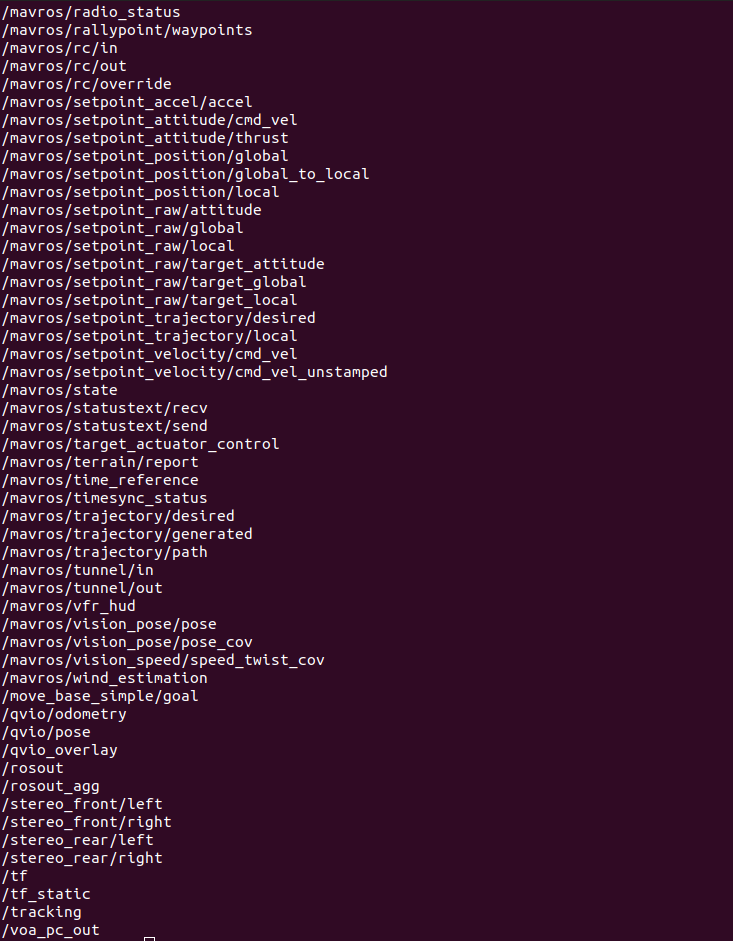
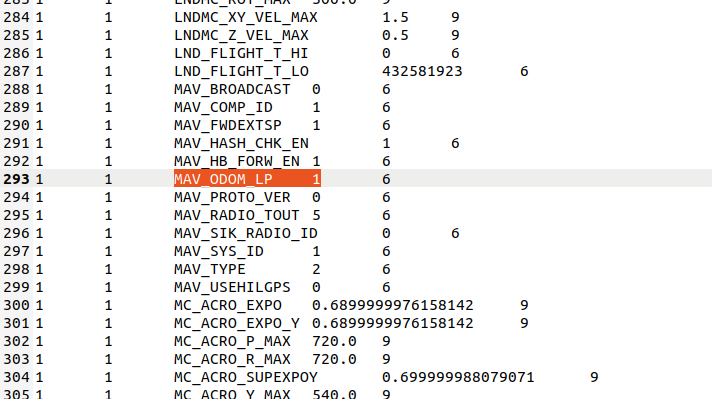
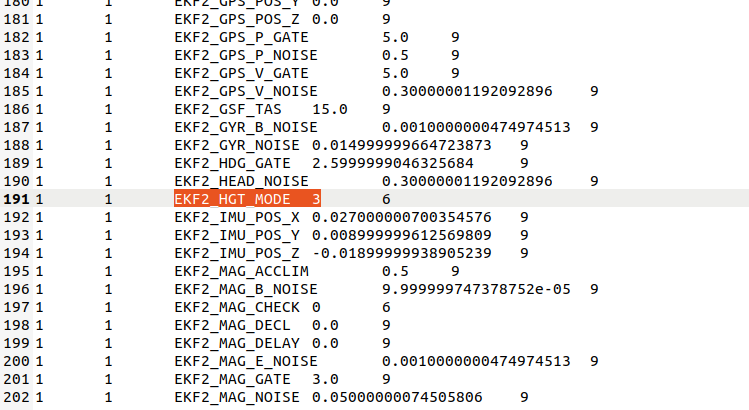
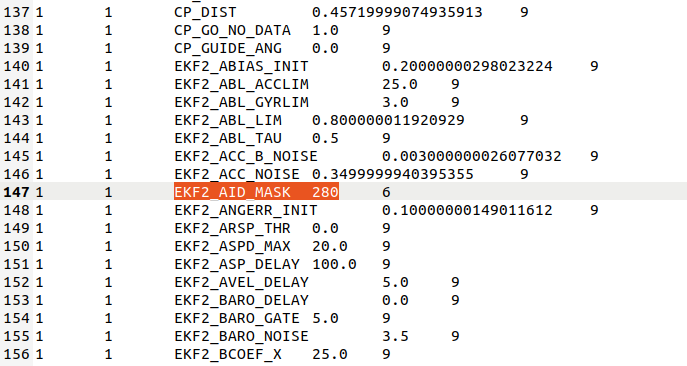
I set the QGC parameters as follows:
But there is nothing that's being published in both those topic. So I am wondering how is the VIO data being send to PX4 to get it fused with EKF2. I can see the ODOMETERY data through the MAVLink Inspector, but through mavros. I tried moving the UAV manually in the lab and plotted the position data from the "/qvio/pose" and "/mavros/local_position/pose". Here are the plots:
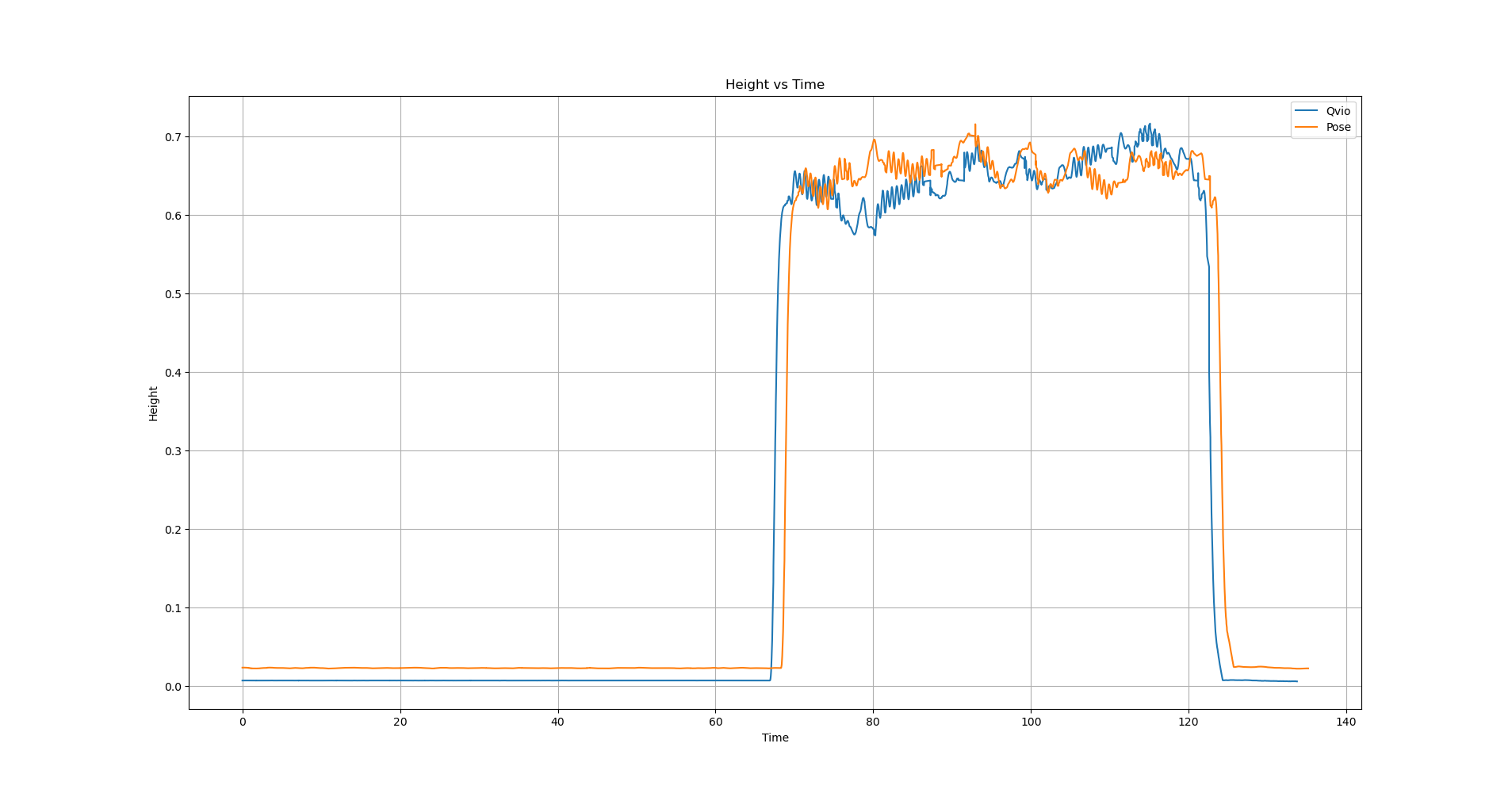
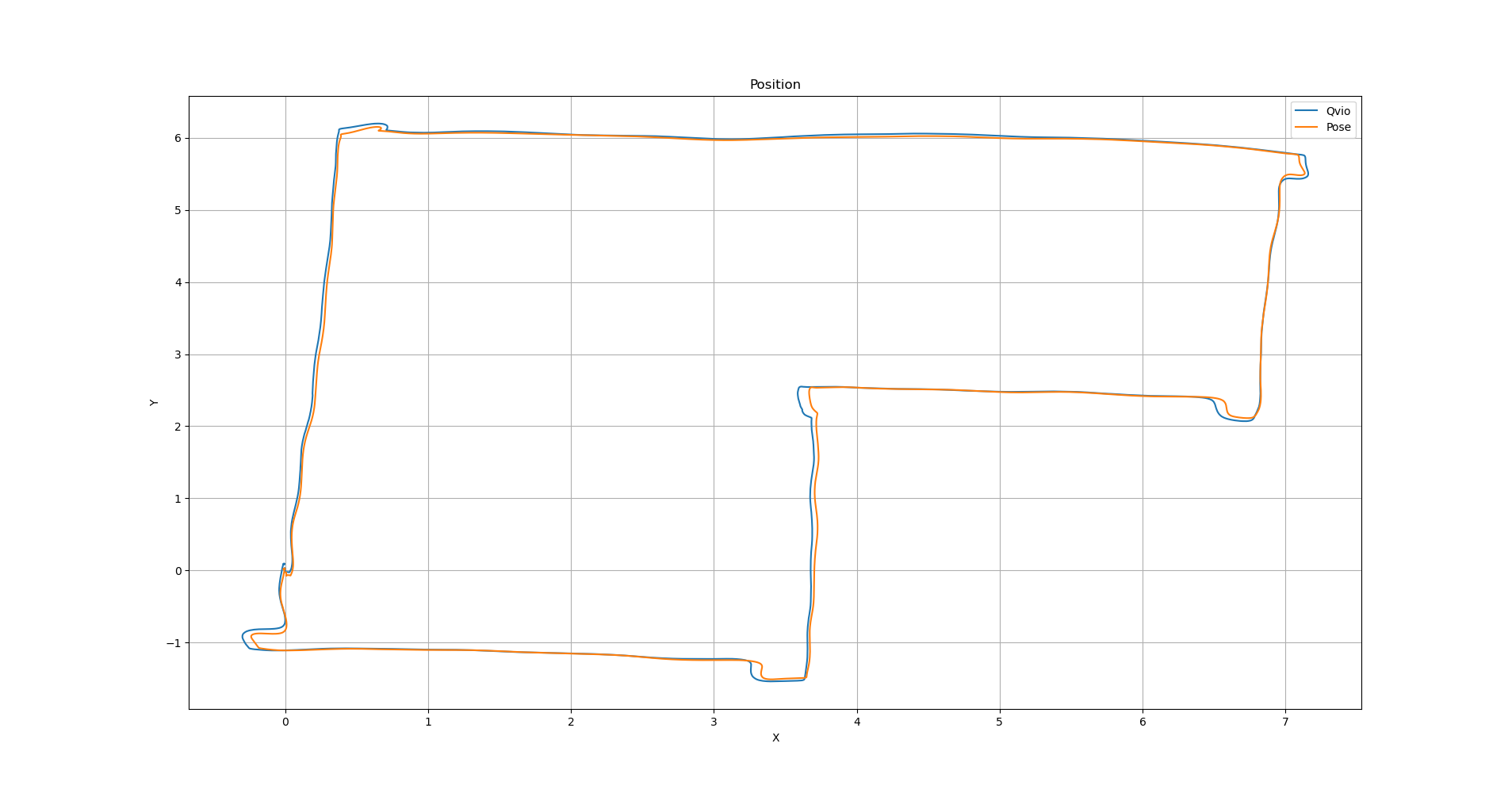
As per the mavros documentation "/mavros/local_position/pose" published fused pose which means the PX4 infact fusing the VIO pose estimates. So, can anyone explain how?