directly in the main folder or do i have to do it in the sub folder? @Eric-Katzfey
A
Latest posts made by aquibrifath
-
RE: "make modalai_rb5-flight_default" target not found while PX4 buildposted in Ask your questions right here!
-
RE: "make modalai_rb5-flight_default" target not found while PX4 buildposted in Ask your questions right here!
@Eric-Katzfey okay i ran the ./make_package.sh and it created a voxl-px4_1.4.16_arm64.deb, should i send to VOXL2 via adb push and unpack it via dpkg?
-
RE: "make modalai_rb5-flight_default" target not found while PX4 buildposted in Ask your questions right here!
@Eric-Katzfey all the packages here http://voxl-packages.modalai.com/dists are for arm64 architecture, am i supposed to run this on VOXL or my PC?
-
RE: "make modalai_rb5-flight_default" target not found while PX4 buildposted in Ask your questions right here!
@Eric-Katzfey Okay, i did everything in https://gitlab.com/voxl-public/voxl-sdk/services/voxl-px4, but it did not create any debain package, can you help me locate it?
As far as i have understood, the PX4 images are build inside PX4/built -
RE: "make modalai_rb5-flight_default" target not found while PX4 buildposted in Ask your questions right here!
do we need VOXL suite or anything of that sort? I just want to upload the lastest PX4 and do a manual flight on VOXL2 to make sure my hardware is running okay, I am trying the PX4 wrapper that you suggested
-
RE: "make modalai_rb5-flight_default" target not found while PX4 buildposted in Ask your questions right here!
Hello, how do you burn PX4 to VOXL2? using make upload or QGC?
-
RE: "make modalai_rb5-flight_default" target not found while PX4 buildposted in Ask your questions right here!
@Eric-Katzfey oh i forgot to add that, tried the latest version, 1.13.0 stable and using the main branch
-
"make modalai_rb5-flight_default" target not found while PX4 buildposted in Ask your questions right here!
Hi i was trying to build PX4 on VOXL2 using https://gitlab.com/voxl-public/rb5-flight/rb5-flight-px4-build-docker/-/tree/master guide
when i was in the docker running make modalai_rb5-flight_default gave me the following error
root@da81ab4039ae:/usr/local/workspace/px4-firmware# make modalai_rb5-flight_default
Makefile:528: *** "Make target modalai_rb5-flight_default not found. It either does not exist or modalai_rb5-flight_default cannot be the first argument. Use 'make help|list_config_targets' to get a list of all possible [configuration] targets.". Stop.so i ran make help to check
root@da81ab4039ae:/usr/local/workspace/px4-firmware# make help
Usage: make <target>
Where <target> is one of:airframe_metadata
airmind_mindpx-v2
all
all_config_targets
all_default_targets
ark_can-flow
ark_can-gps
ark_can-rtk-gps
ark_cannode
atl_mantis-edu
av_x-v1
beaglebone_blue
bitcraze_crazyflie
bitcraze_crazyflie21
bootloaders_update
check
check_format
check_linux
check_nuttx
check_nxp
check_px4
check_rtps
clang-tidy
clang-tidy-fix
clang-tidy-quiet
clean
coverity_scan
cppcheck
cuav_can-gps-v1
cuav_nora
cuav_x7pro
cubepilot_cubeorange
cubepilot_cubeyellow
cubepilot_io-v2
diatone_mamba-f405-mk2
distclean
doxygen
emlid_navio2
extract_events
format
freefly_can-rtk-gps
gazeboclean
help
holybro_can-gps-v1
holybro_durandal-v1
holybro_kakutef7
holybro_kakuteh7
holybro_pix32v5
list_config_targets
matek_gnss-m9n-f4
matek_h743
matek_h743-mini
matek_h743-slim
misc_qgc_extra_firmware
modalai_fc-v1
modalai_fc-v2
module_documentation
mro_ctrl-zero-classic
mro_ctrl-zero-f7
mro_ctrl-zero-f7-oem
mro_ctrl-zero-h7
mro_ctrl-zero-h7-oem
mro_pixracerpro
mro_x21
mro_x21-777
nxp_fmuk66-e
nxp_fmuk66-v3
nxp_fmurt1062-v1
nxp_ucans32k146
omnibus_f4sd
parameters_metadata
px4_fmu-v2
px4_fmu-v3
px4_fmu-v4
px4_fmu-v4pro
px4_fmu-v5
px4_fmu-v5x
px4_fmu-v6c
px4_fmu-v6u
px4_fmu-v6x
px4_io-v2
px4_metadata
px4_raspberrypi
px4_sitl
px4_sitl_default-clang
px4fmu_firmware
px4io_update
python_coverage
qgc_firmware
quick_check
raspberrypi_pico
rostest
rostest_run
scan-build
scumaker_pilotpi
shellcheck_all
sizes
sky-drones_smartap-airlink
spracing_h7extreme
submodulesclean
submodulesupdate
tests
tests_avoidance
tests_coverage
tests_integration
tests_integration_coverage
tests_mission
tests_mission_coverage
tests_offboard
uorb_graphs
update_px4_msgs
update_px4_ros_com
update_ros2_bridge
updateconfig
uvify_core
validate_module_configsOr, make <config_target> [<make_target(s)>]
Use 'make list_config_targets' for a list of configuration targets.and i noticed that modalai_rb5-flight_default is not found, can you help me with this?
-
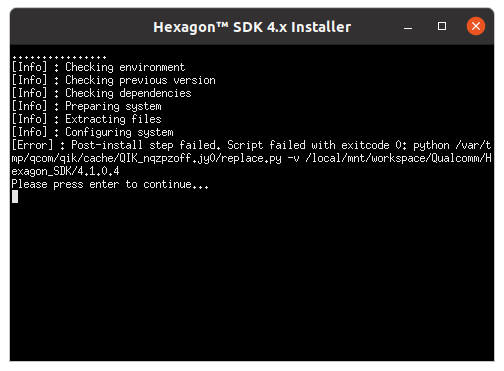
Qualcomm package manager (QPM) Hexagon installposted in Ask your questions right here!
Hi, I am in the step : Install and archive Hexagon SDK version 4.1.0.4
when i select the default location /local/mnt/workspace/Qualcomm/Hexagon_SDK and hit install, i get this error, anyone had the same issue? or do you know how to solve this?