No time sync between imu messages and tracking camera image messages in ROS
-
I recorded a rosbag from M500 and looked closely at the timestamps (header.stamp in ros messages) of my imu messages [IMU0) and image messages (tracking camera). I see that they are not synced. I am attaching the files in drive link for your perusal. The timestamp I am providing in the files is directly obtained from ros messages. There is no post processing.
https://drive.google.com/drive/folders/18PzGYlnwzXftc_U19rA7rDzj4ZeKoSEm?usp=sharingPlease clarify if the ros messages should be time synced for IMU0 and tracking camera as expected for a good VIO stack or I am missing something.
Another thing to note is I am seeing perfect time sync in the stereo images. -
The tracking camera and imu will not be time synced. The tracking camera samples at 30 hz whereas the imu samples at around 1khz. This allows for the vio algorithm to continue to estimate position between tracking camera frames and provide closer to real-time odometry.
-
ok. But in the ros-topics I am getting messages at ~220 hz only. Do I need to configure anything to record the ros imu messages at 1 Khz.
Another clarification I will need is the mv-vislam library uses IMU from the modal pipes at 1 kHz with 30 Hz images from the camera server.
-
ok. But in the ros-topics I am getting messages at ~220 hz only. Do I need to configure anything to record the ros imu messages at 1 Khz.
Another clarification I will need is the mv-vislam library uses IMU from the modal pipes at 1 kHz with 30 Hz images from the camera server.
Were you able to find a resolution to this? We are also experiencing the exact same issue has you. IMU is coming in around 220 Hz and there is alot of dropped data and timestamp jumping. Check out this sample graph below.
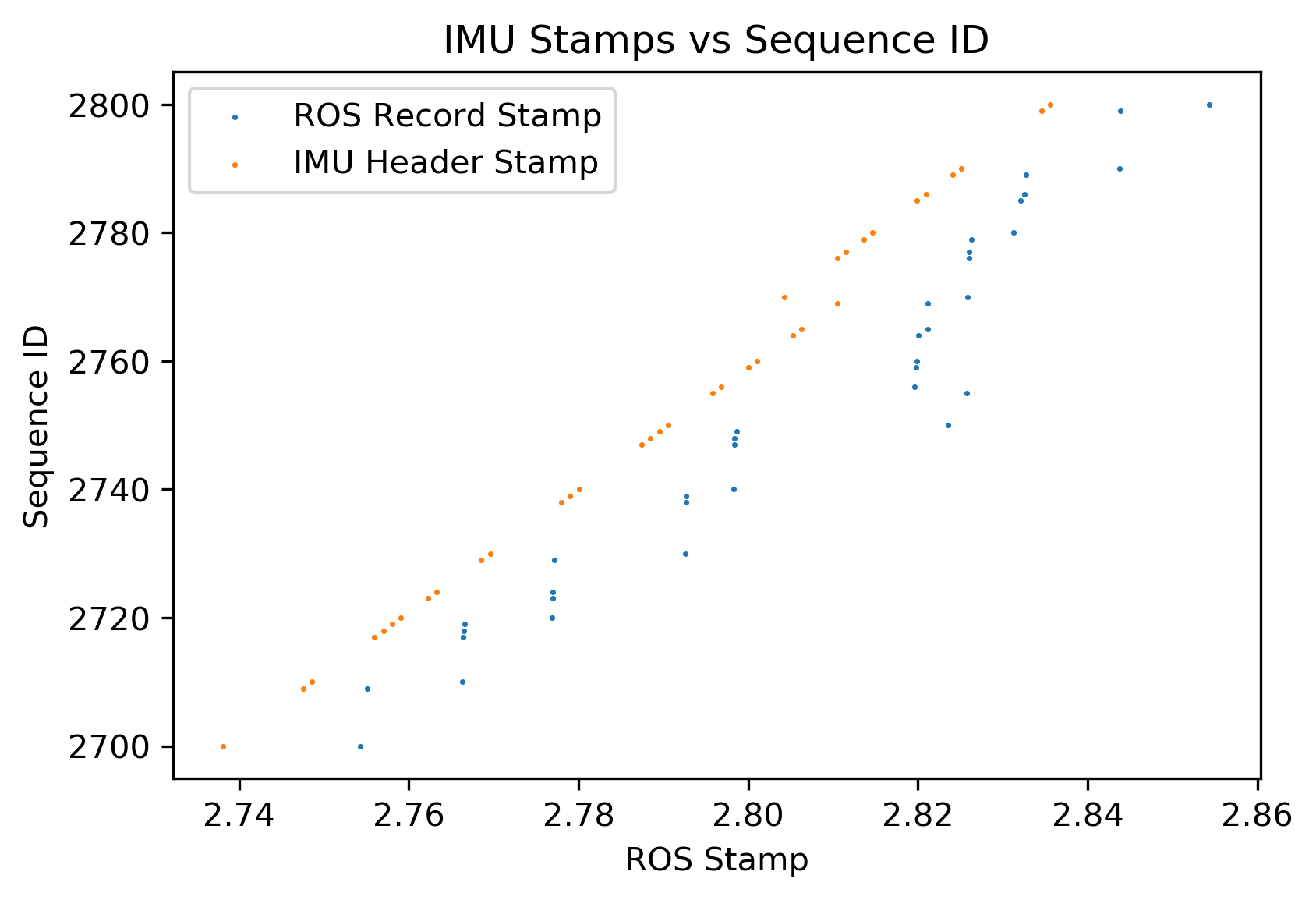
-
E eric referenced this topic on
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login