Error on running dfs_server. Cannot get Point Cloud
-
Hi!
I want to get the point cloud from the stereo imagery using the voxl-dfs-server. I have calibrated the stereo camera using the instructions given here. The calibration procedure was successful and it generated the left.yaml, right.yaml and calibration_stereo.xml files. However, it did not generate the opencv_stereo_extrinsics.yml and opencv_stereo_intrinsics.yml files. I could not find anywhere on the docs any instructions to generate these files. So I had to write them myself taking information from ost.txt. Here are the two files that I wrote:- opencv_stereo_extrinsics.yml
%YAML:1.0 R1: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 0.999731, -0.005262, -0.022599, 0.005377, 0.999973, 0.005039, 0.022572, -0.005159, 0.999732] P1: !!opencv-matrix rows: 3 cols: 4 dt: d data: [527.372271, 0.000000, 331.544373, 0.000000, 0.000000, 527.372271, 240.925325, 0.000000, 0.000000, 0.000000, 1.000000, 0.000000] R2: !!opencv-matrix rows: 3 cols: 3 dt: d data: [0.998424, 0.024289, -0.050596, -0.024547, 0.999689, -0.004480, 0.050471, 0.005715, 0.998709] P2: !!opencv-matrix rows: 3 cols: 4 dt: d data: [527.372271, 0.000000, 331.544373, -42.405281, 0.000000, 527.372271, 240.925325, 0.000000, 0.000000, 0.000000, 1.000000, 0.000000]- opencv_stereo_intrinsics.yml
M1: !!opencv-matrix rows: 3 cols: 3 dt: d data: [488.682800, 0.000000, 321.505138, 0.000000, 489.299446, 232.298091, 0.000000, 0.000000, 1.000000] D1: !!opencv-matrix rows: 1 cols: 5 dt: d data: [-0.171999, 0.074949, 0.001013, -0.001734, 0.000000] M2: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 500.025405, 0.000000, 290.363517, 0.000000, 500.227973, 248.074606, 0.000000, 0.000000, 1.000000] D2: !!opencv-matrix rows: 1 cols: 5 dt: d data: [-0.194946, 0.140224, 0.001638, 0.000149, 0.000000]Then I pushed these files to the VOXL using
./push_stereo_cal_to_voxl.sh
However, when I run the voxl-dfs-server on the VOXL I get the following output
I am suspicious of my .yml files that I generated. Do you have any working .yml files that I can use as template and change values for my system.
Please let me know how can I debug this and get the point cloud from the stereo imagery with dfs-server.
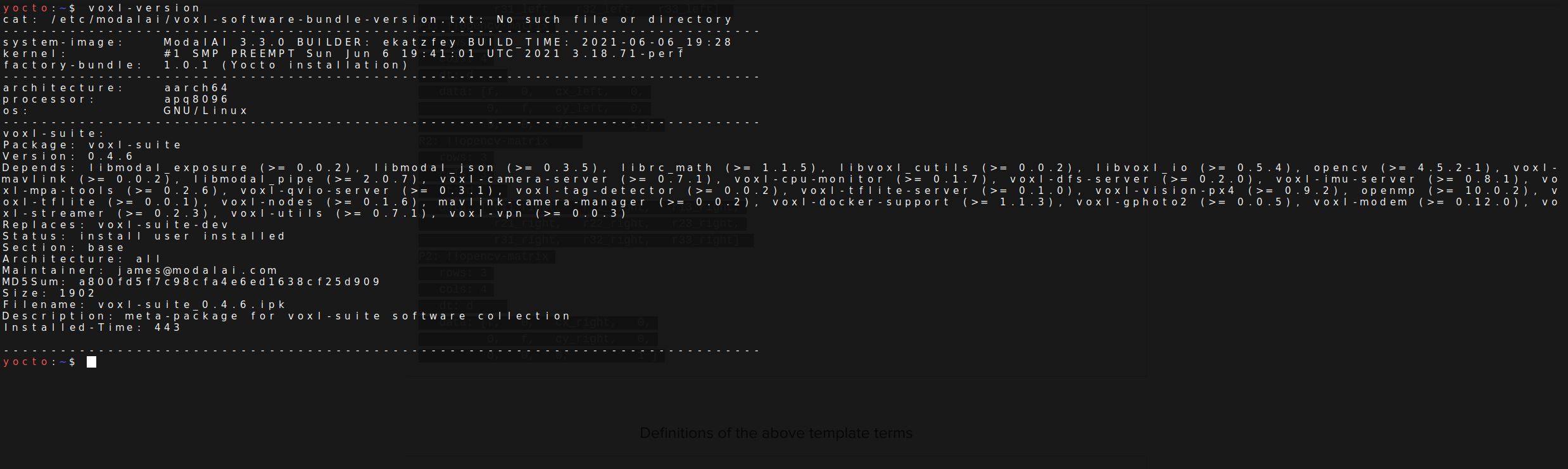
Output ofvoxl-versionFYI:
Please let me know if any other information is needed. I'd appreciate any insight into solving this.
Thanks
Prasad -
Hi Prasad,
I've seen the error that you talked about with the ungenerated once or twice and running the calibration procedure again properly generated the files.
This is a sample stereo cal from my board (that has a few additional data fields from a soon to be released cal rework) that would serve as a good general idea of what the files should look like. The DFS algorithm is, however, very sensitive to inaccuracies and I'd strongly recommend trying to calibrate your cameras again, but if that doesn't work you can add your values to this format:
yocto:/$ cat /data/modalai/opencv_stereo_extrinsics.yml %YAML:1.0 --- R: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 9.9965050025202740e-01, -5.6519379540328910e-04, 2.6430245966411248e-02, 2.8842568739021546e-03, 9.9613506820545850e-01, -8.7787282413751958e-02, -2.6278478041102546e-02, 8.7832832399280705e-02, 9.9578854941426354e-01 ] T: !!opencv-matrix rows: 3 cols: 1 dt: d data: [ -7.9514399346537298e-02, -2.7245018421472277e-03, 6.0288890076187220e-04 ] reprojection_error: 2.8997817600221831e-01 calibration_time: "2021-09-30 22:52:56" yocto:/$ cat /data/modalai/opencv_stereo_intrinsics.yml %YAML:1.0 --- M1: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 4.9291881707143079e+02, 0., 3.0643471662712096e+02, 0., 4.9232152259255315e+02, 2.1697996372929907e+02, 0., 0., 1. ] D1: !!opencv-matrix rows: 5 cols: 1 dt: d data: [ -1.6984598364049669e-01, 6.0034285910162230e-02, -8.8644933037586781e-04, -4.1419313003228072e-04, 0. ] reprojection_error1: 1.9741562557305206e-01 M2: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 4.9673975454370270e+02, 0., 3.1711708934220133e+02, 0., 4.9610254255552854e+02, 2.2876245199481119e+02, 0., 0., 1. ] D2: !!opencv-matrix rows: 5 cols: 1 dt: d data: [ -1.6758727319959599e-01, 5.4041564358266361e-02, -1.5695644102222835e-03, -5.8891426327232642e-04, 0. ] reprojection_error2: 3.1594418176162986e-01 width: 640 height: 480 distortion_model: plumb_bob calibration_time: "2021-09-30 22:52:56"
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login