QVIO data and EKF2 integration.
-
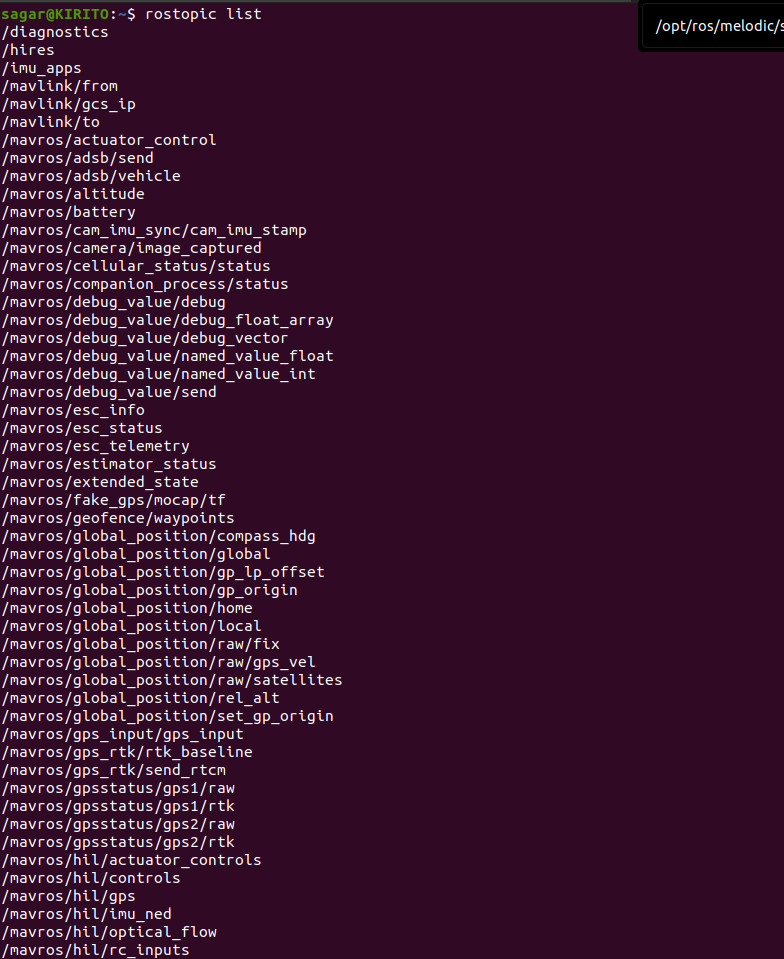
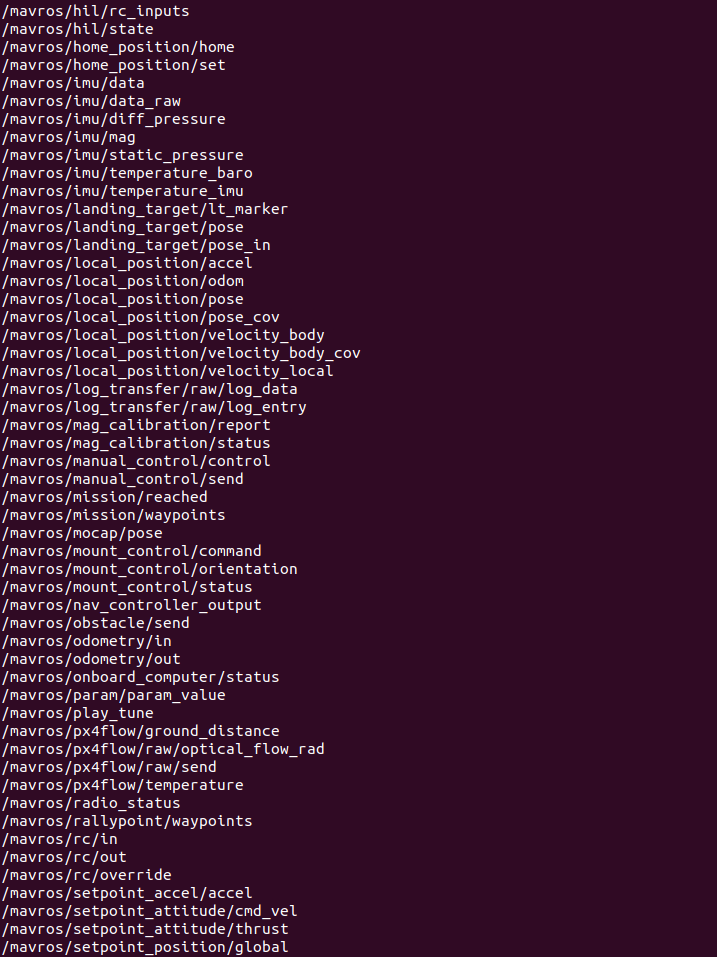
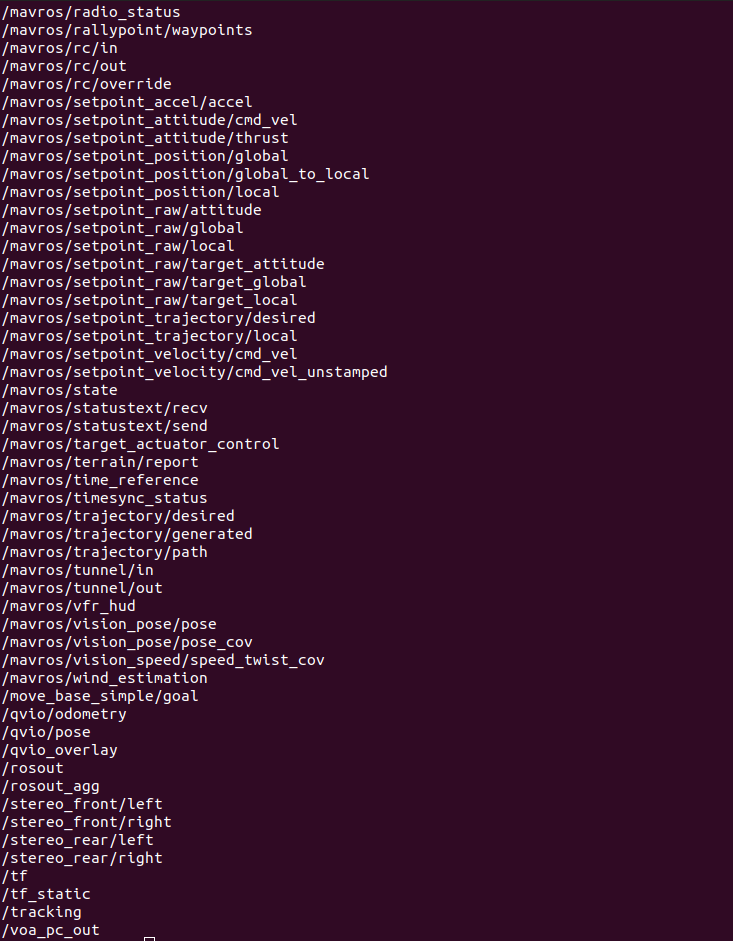
I am trying to modify the VIO algorithm. I was going through the PX4 documentation: Using Vision or Motion Capture Systems for Position Estimation. They mentioned that in order to add the VIO data in the EKF2, it needs to be published either in "/mavros/vision_pose/pose" or "/mavros/odometry/out". I launched the voxl_mpa_to_ros and px4 launch files, here is the all available rostopics:
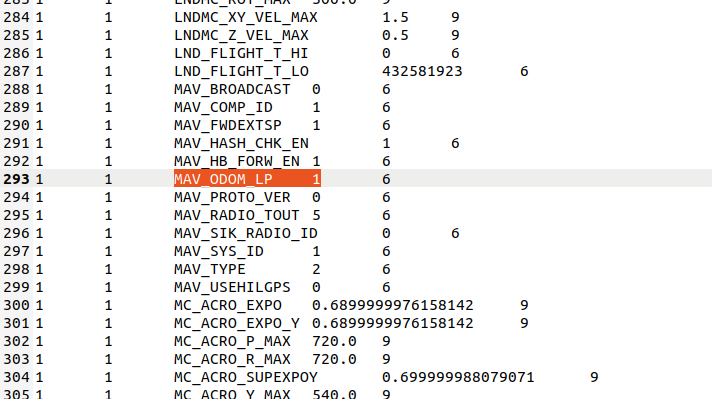
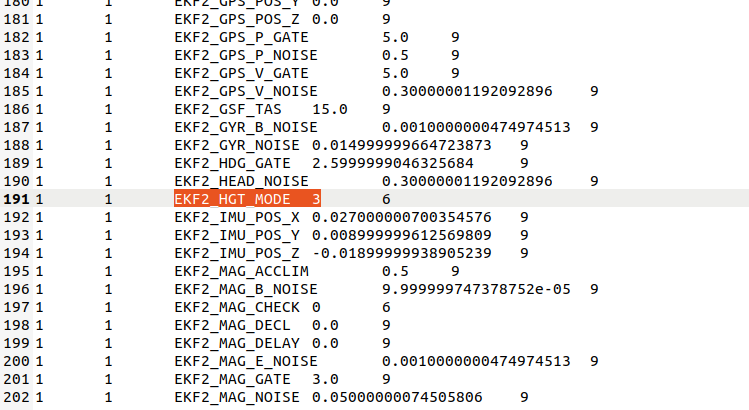
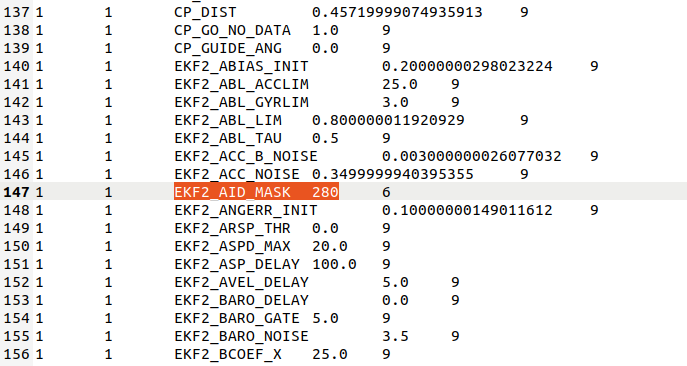
I set the QGC parameters as follows:
But there is nothing that's being published in both those topic. So I am wondering how is the VIO data being send to PX4 to get it fused with EKF2. I can see the ODOMETERY data through the MAVLink Inspector, but through mavros. I tried moving the UAV manually in the lab and plotted the position data from the "/qvio/pose" and "/mavros/local_position/pose". Here are the plots:
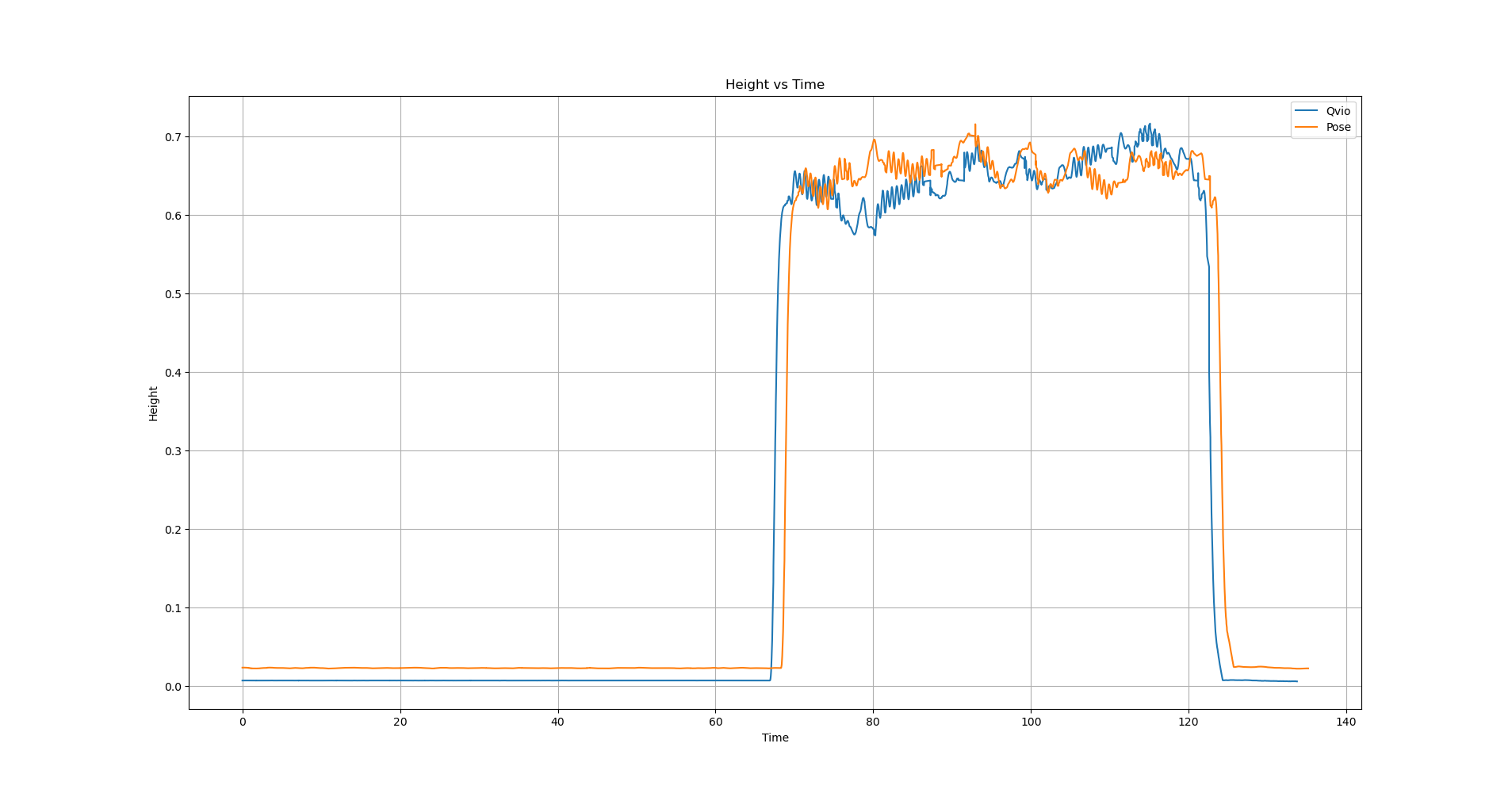
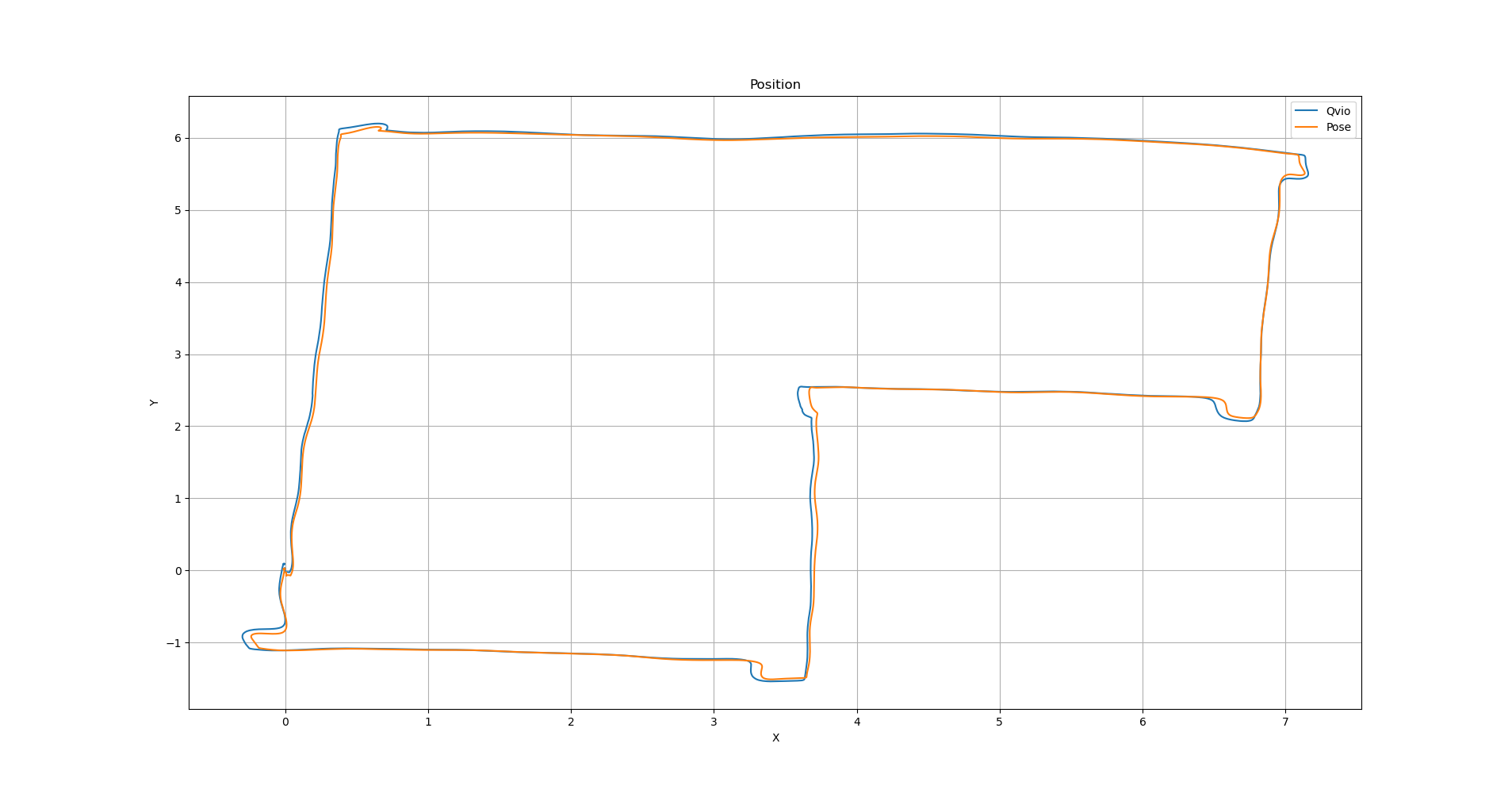
As per the mavros documentation "/mavros/local_position/pose" published fused pose which means the PX4 infact fusing the VIO pose estimates. So, can anyone explain how?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login