ToF Pointcloud on ROS (RVIZ)
-
Hi all,
This is a quick question - I appear to have ROS set up and working fine on the VOXL-CAM but simply can't visualize point cloud data from the ToF sensor. The ToF Depth topic works, and the camera topics work, but the ToF PC topic isn't cooperating. Is the VOXL-CAM not sending something needed for visualization (like QVIO data)? QVIO is working. There are no other options under 'Global Options' for 'Fixed Frame' other than 'Map'. The following error is given: For frame [world]: Fixed Frame [map] does not exist.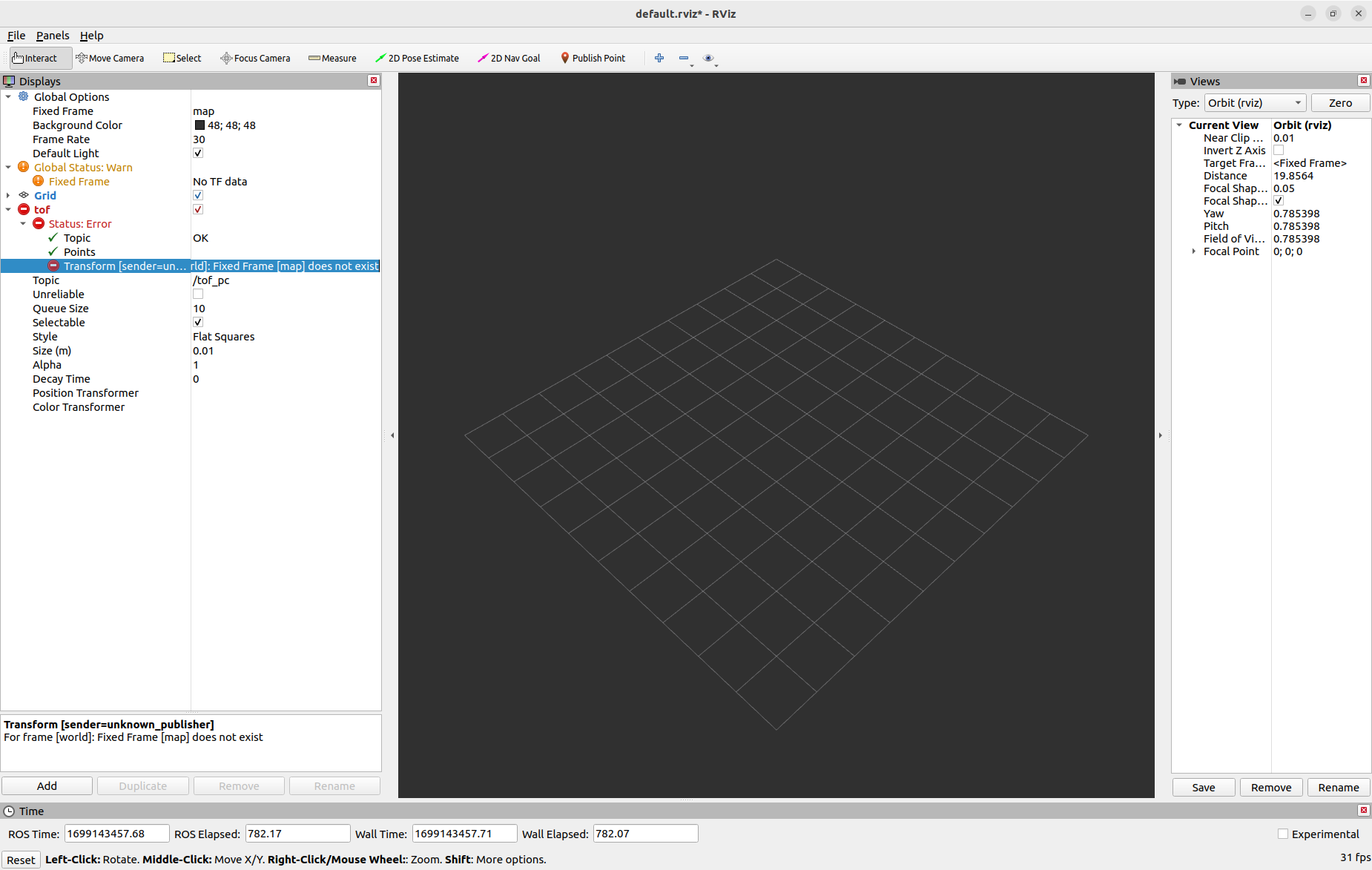
Thank you!
-
@Amber-Elaine-Parker It's missing a TF. After launching ROS Indigo on the VOXL, open a new bash and type:
rosrun tf static_transform_publisher 0 0 0 0 0 0 1 map world 10This is enough to create the world frame and make the ToF sensor PointCloud2 message display on Rviz (if you select the world frame under global options in Rviz). However, it looks like the frame isn't oriented correctly in my case. Editing the parameters of this command might change the orientation of the new world frame.
I don't know enough about ROS/VOXL SDK to confidently call this an oversight by the ModalAI team, but there should definitely be a mention that this is required somewhere within the documentation.
-
N nickyblanch referenced this topic on