TOF detecting non-existing objects
-
Hi everyone,
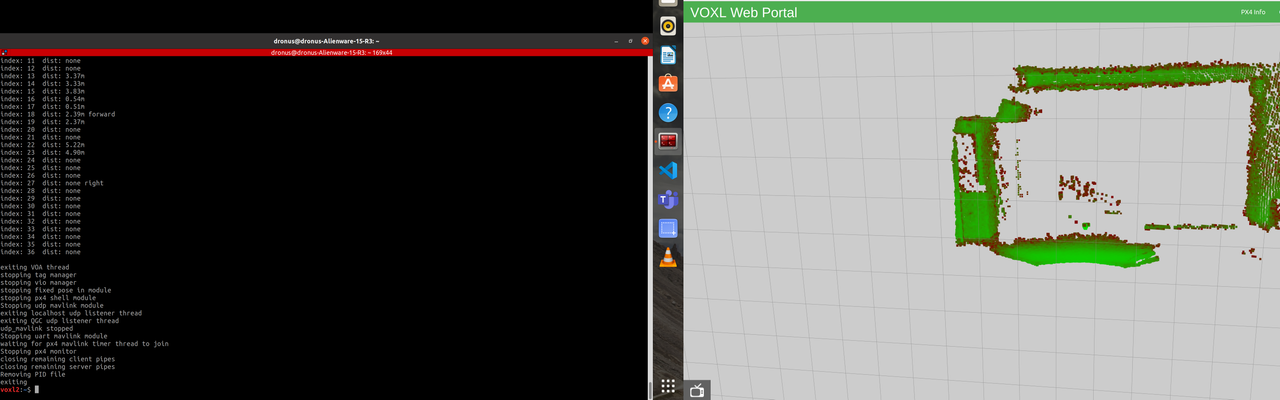
I am trying to detect obstacles with a TOF sensor on VOXL2 by placing it in front of the drone. However, as you can see in the picture below, the sensor is detecting a fake object (distant ~0.5m) even if there's nothing in front of the drone. Are there any parameters in the .conf files where I can tune the confidence of the sensor or apply some sort of filtering?
-
Any ideas from the dev team?