TOF detecting non-existing objects
-
Hi everyone,
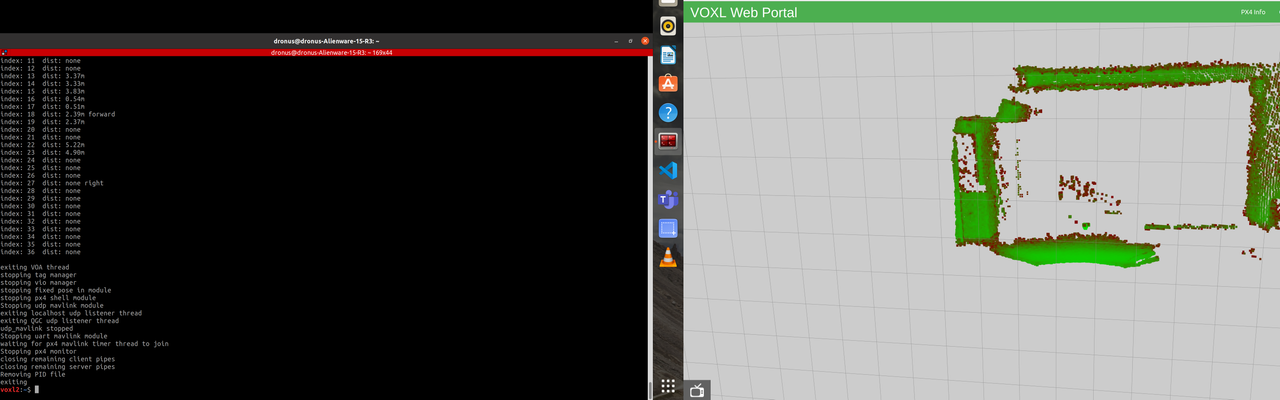
I am trying to detect obstacles with a TOF sensor on VOXL2 by placing it in front of the drone. However, as you can see in the picture below, the sensor is detecting a fake object (distant ~0.5m) even if there's nothing in front of the drone. Are there any parameters in the .conf files where I can tune the confidence of the sensor or apply some sort of filtering?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login