Tracking Camera's Pose Relative to Drone
-
I need to know the camera's position and orientation relative to the drone's body frame. This is so I can calculate its homogenous transformation relative to the drone, and then combine that camera imagery to localize detected objects in 3D space.
I need to know the values of dx, dz and theta from this image:
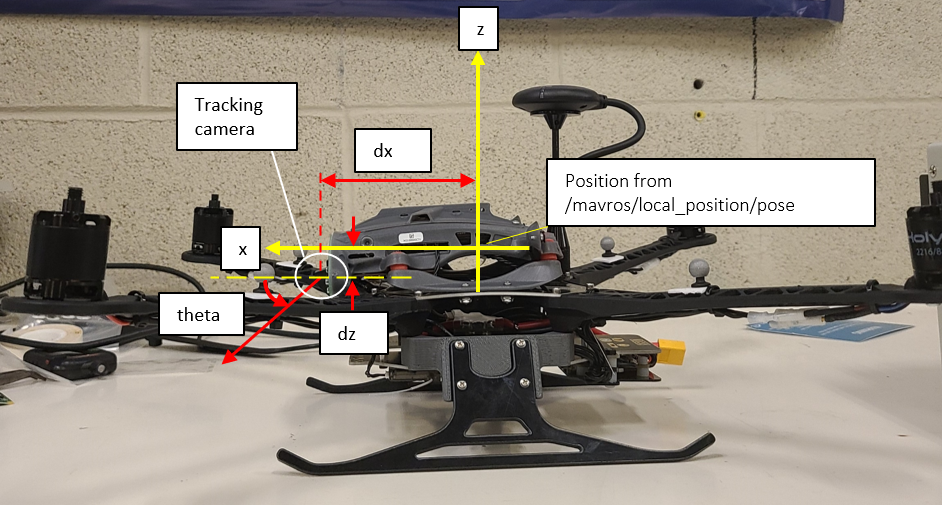
I'm assuming that the camera is centered laterally, so dy=0 (please correct me if this is incorrect), and that there is no roll or yaw with regards to its orientation. Hence the theta is the pitch or how much the camera is rotated along the y axis. Positive direction of y axis in image is out of the page. -
Hi,
If you're running the rb5 flight with VOXL SDK on it, you can see the relations between elements in
/etc/modalai/extrinsics.conf, if not you can see the file that would've been put there here. We don't havetracking-->bodyrelation defined directly but we havetracking-->px4 imuandpx4_imu-->bodyallowing you to calculate the relation. -
Hi,
If you're running the rb5 flight with VOXL SDK on it, you can see the relations between elements in
/etc/modalai/extrinsics.conf, if not you can see the file that would've been put there here. We don't havetracking-->bodyrelation defined directly but we havetracking-->px4 imuandpx4_imu-->bodyallowing you to calculate the relation.Thanks, that's exactly what I'm looking for
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login