Indoor Altitude Estimate Divergence
-
Hey All,
Testing indoors I've had several instances of altitude estimate divergence requiring reversion to manual control and an emergency landing on a starling 2 max.
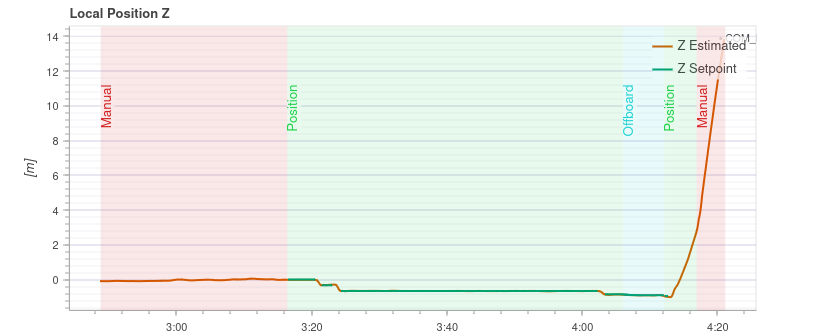
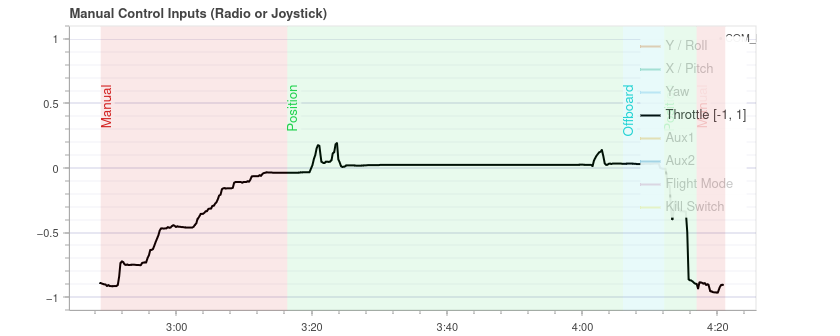
It seems that the error begins when I activate the offboard mode with the default figure 8 loaded.
My assumption is that as the drone yaws it loses some of the VIO points and is uncertain about its altitude causing a rapid climb in offboard and position modes.What would the best way be to correct this issue?
- I could try to add visual markers (i.e. april tags) to the warehouse walls to provide more references?
- Does the starling 2 max use both forward and downward facing cameras for VIO? I thought I saw a post about this feature being enabled in the nightly builds but am unsure.
- Should I expect these issues to improve inherently by moving into a more visually active space (inside an unoccupied office area)? I am hesitant to fly in more confined areas without being confident in the aircraft estimate and position holding reliability.
Kind regards,
Griffin -
Hey All,
Testing indoors I've had several instances of altitude estimate divergence requiring reversion to manual control and an emergency landing on a starling 2 max.
It seems that the error begins when I activate the offboard mode with the default figure 8 loaded.
My assumption is that as the drone yaws it loses some of the VIO points and is uncertain about its altitude causing a rapid climb in offboard and position modes.What would the best way be to correct this issue?
- I could try to add visual markers (i.e. april tags) to the warehouse walls to provide more references?
- Does the starling 2 max use both forward and downward facing cameras for VIO? I thought I saw a post about this feature being enabled in the nightly builds but am unsure.
- Should I expect these issues to improve inherently by moving into a more visually active space (inside an unoccupied office area)? I am hesitant to fly in more confined areas without being confident in the aircraft estimate and position holding reliability.
Kind regards,
Griffin@admin @Moderator Any suggestions on how to prevent this altitude divergence? This happens somewhat regularly and requires reversion to manual control.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login