ROS2 ToF topic not showing proper data
-
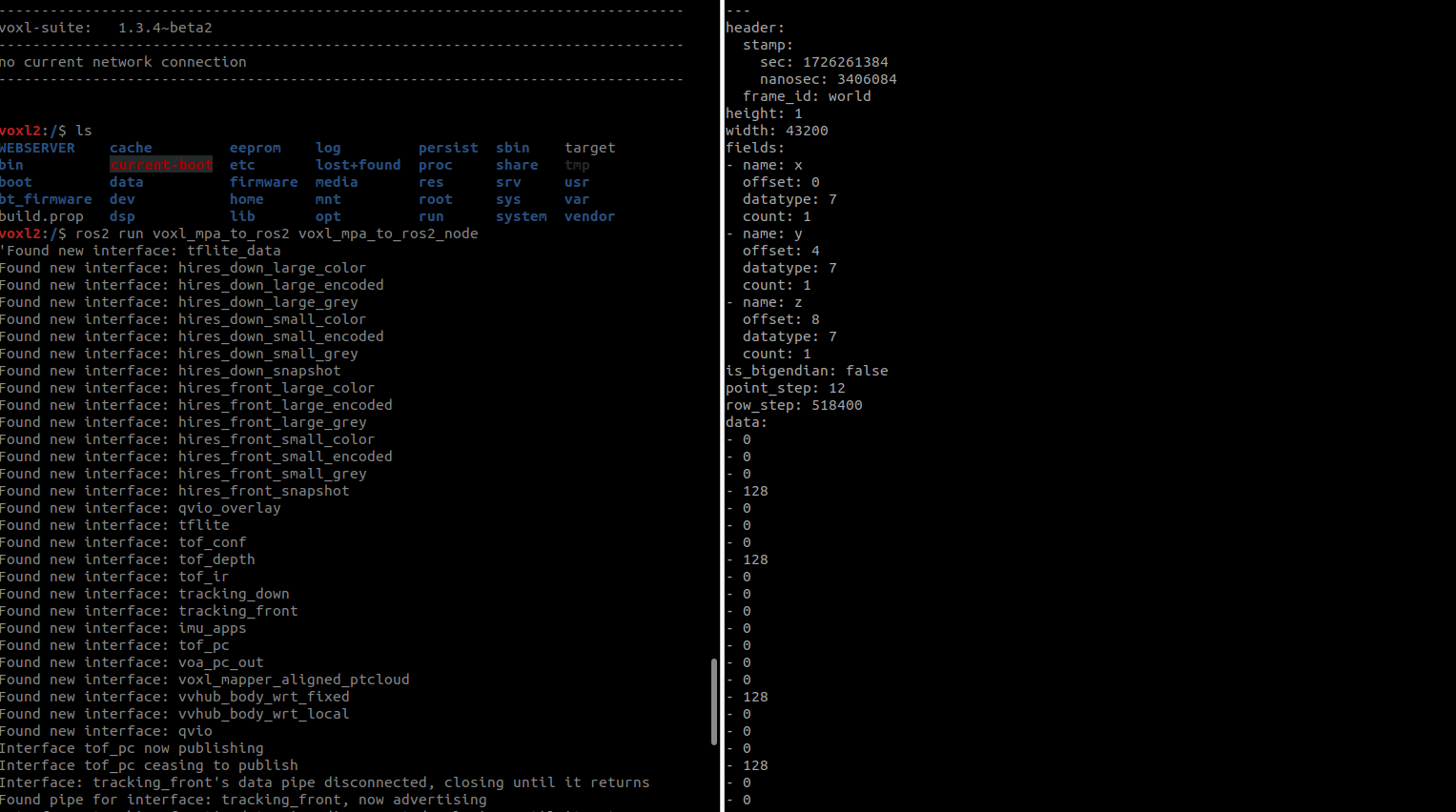
Hi I'm using a Starling 2 Max with a ToF sensor. I am using voxl-suite 1.3.4~beta2 and have the ToF sensor working in the voxl mapper. However, when I echo the ROS2 topic /tof_pc when running the voxl_mpa_to_ros2_node node I don't get proper data. See image below.
Has anyone experienced this issue? Should I make the switch to ROS? -
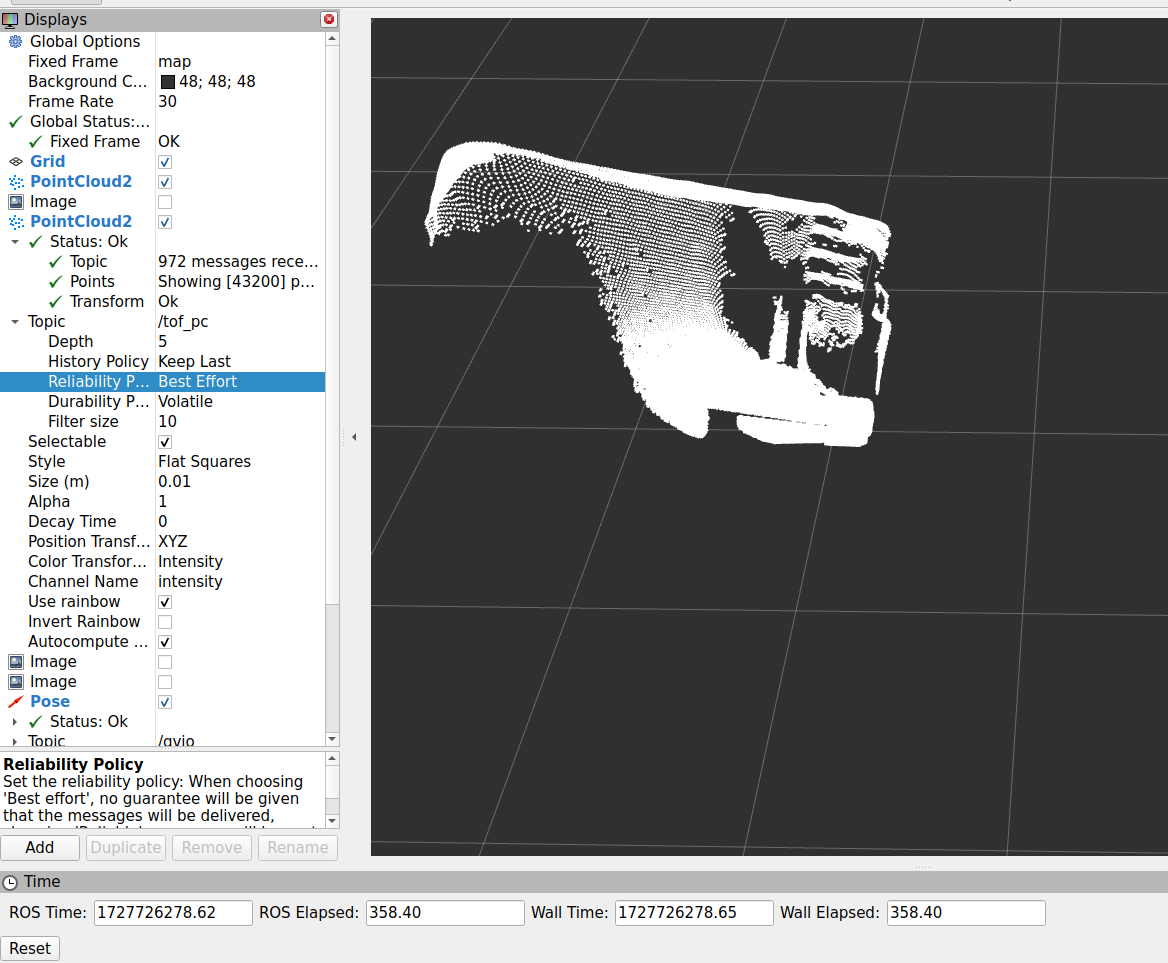
Please verify the PC data in rviz2. What you see in rviz2 should look exactly alike to what is shown in voxal portal for tof_pc. Note that the point step size is 12. See this guide for more info on pointcloud data message data
Point cloud data will look very different from image data, since the data field is constructed very different from BGR image formats.
I have replicated these results in a starling2 as well, with voxl-mpa-to-ros2 dev branch:
Note that you may need to spin up a static transform to see the pointcloud data in ROS:
ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 map world
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login