It ended up being a combination of incorrect ports and pin alignment. The cameras worked great once I got the correct reference frame nailed down.
Posts made by Jeremy Frederick
-
RE: Hires IMX214 M0024-2 causing ADB to stop workingposted in Image Sensors
-
RE: Hires IMX214 M0024-2 causing ADB to stop workingposted in Image Sensors
@tom with no cameras I can ADB on
-
Hires IMX214 M0024-2 causing ADB to stop workingposted in Image Sensors
I was attempting voxl-configure-cams and it failed to detect the IMX214 hires camera. I unplugged the voxl2 and verified the ports that the hires was plugged into. It was on the wrong port, it was on J6L instead of J7U. I reinstalled the hires camera on the correct port. The next time I powered the Voxl2 on, ADB would not work and lsusb shows QUSB_BULK instead of KONA-QRD. I read on a different post that QSUB_BULK is typically an indication of a hardware issue.
Did I fry the IMX214 M0024-2 by putting it on the wrong port? -
RE: Poor performance with vertical oriented tracking cameraposted in GPS-denied Navigation (VIO)
@Alex-Kushleyev Alex, looks like the issue was due to the mini being mounted upside down, and me failing to set that correctly in the extrinsic configuration file. I set the body - imu_apps to expect an 180 degree roll configuration and that solved my issue. The core of which ended up being that the voxl-vision-hub service was reading the system as upside down and therefore resetting the service every few seconds, causing the issue.
Is this the correct way to report the flight controller being upside down to the vision service? I've already confirmed the tracking sensor to IMU relation is correct. My edit seems to work, but I want to make sure it is correct.
-
RE: Poor performance with vertical oriented tracking cameraposted in GPS-denied Navigation (VIO)
@Alex-Kushleyev This is very helpful. My major issue however is a lack of quality for which I am struggling to understand,
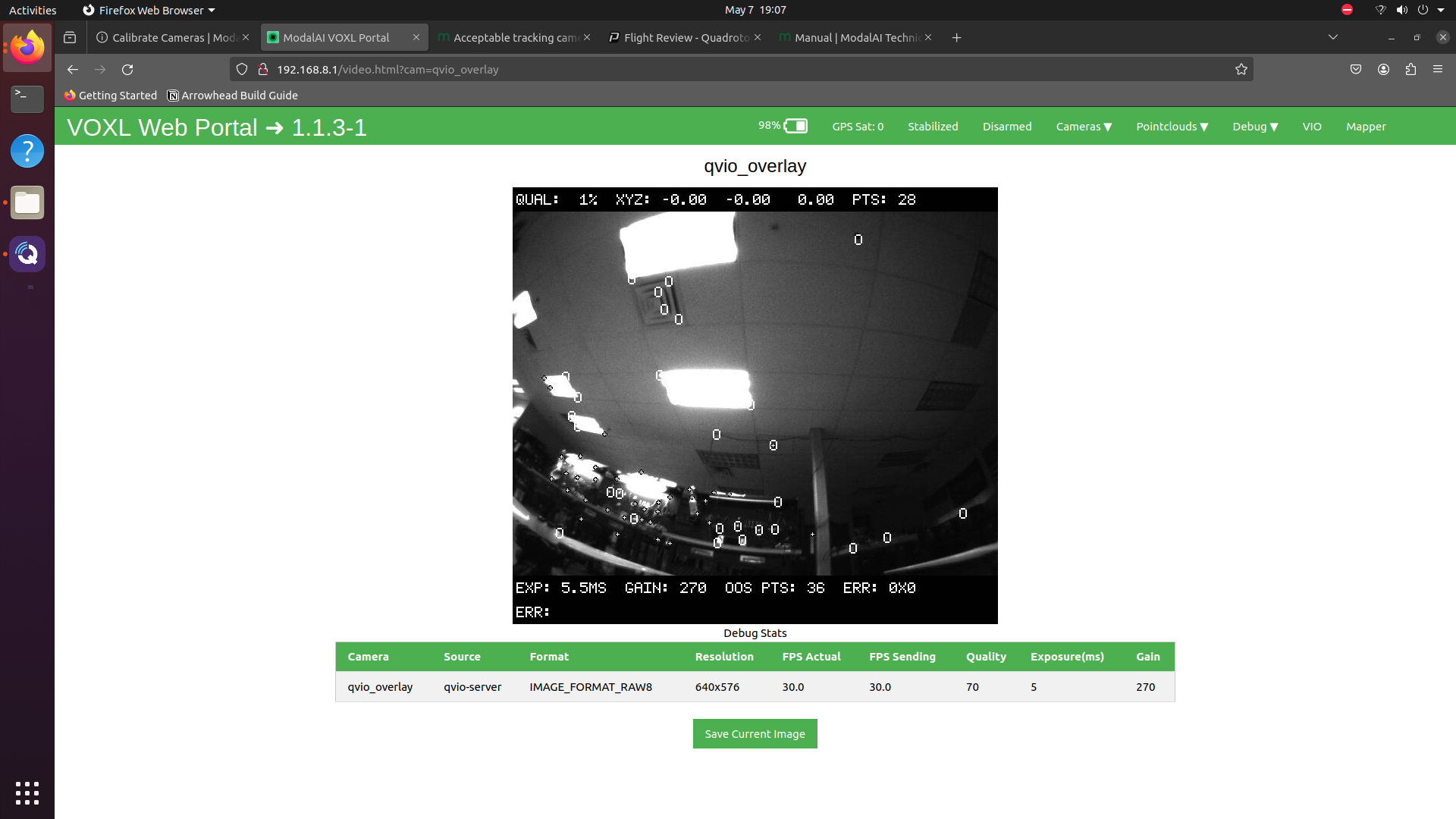
This is using the Voxl 2 Mini, SDK 1.1.3 with the OV7251 sensor. Other platforms I've built with this sensor have no issues maintaining over 50% quality in this environment (albeit on the full VOXL 2, this is my first time using the mini). It also seems to have issues with the calibration, I've already replaced the tracking sensor with no change. The quality of the picture is equivalent to what I'd expect as well. Tomorrow I am going to try and upgrade to SDK 1.2 to see if there is a difference.
-
Poor performance with vertical oriented tracking cameraposted in GPS-denied Navigation (VIO)
For a project I'm working on, we need to operate the tracking camera facing directly up or 45 degrees vertical (from forward facing). In either orientation, the tracking camera is able to pick up significant points but cannot seem to get a quality higher then 1-5% causing poor VIO performance. I've set the extrinsic file, when the camera is pointed 45 degrees up from forward facing, to be RPY( 0, 270, 90). Is this correct?
-
RE: voxl-px4 service pipeline uORB failureposted in VOXL 2
@Eric-Katzfey That seems to have solved the issue, now were able to establish a connection to QGC. Any idea why that would cause an issue?
-
RE: M0014 vs M0149 tracking cameras for indoor VIOposted in Ask your questions right here!
@Moderator Great, I noticed in SDK 1.2 there is now support for dual tracking cameras in the camera server, can both feeds be fed into the QVIO service to allow for the use of both cameras in VIO?
-
RE: voxl-px4 service pipeline uORB failureposted in VOXL 2
@Jeremy-Frederick More Info: I've upgraded to SDK 1.2 and am having the same issue. It seems like the mavlink pipe is having trouble connecting as well, whenever I attempt to read the onboard mavlink messages, with voxl-inspect-mavlink, it indefinitely waits for the pipe to connect.
-
RE: voxl-px4 service pipeline uORB failureposted in VOXL 2
@Alex-Kushleyev Circling back to this as bandwidth opens up again, the board shipped with 1.1.3 but we downgraded to 1.1.2 for consistency across our fleet. After disabling the GPS driver, here is the read out. Once it begins to repeat the standard error event 2, it continues to do so until commanded to cancel.
voxl2:/$ voxl-px4
[INFO] Reading from /etc/modalai/voxl-px4.conf
Found DSP signature file
[INFO] Daemon mode enabled
GPS=NONE
RC=SPEKTRUM
ESC=VOXL_ESC
POWER MANAGER=VOXLPM
DISTANCE SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=ENABLE
SENSOR_CAL=ACTUAL
EXTRA STEPS:
INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM.
INFO [px4] assuming working directory is rootfs, no symlinks needed.
INFO [muorb] Got muorb init command
Sending initialization request
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
INFO [muorb] SLPI: muorb aggregator thread running
INFO [muorb] muorb protobuf initalize method succeeded
INFO [muorb] succesfully did ADVERTISE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097656
INFO [muorb] succesfully did SUBSCRIBE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097655
INFO [muorb] succesfully did TOPIC_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097654
INFO [muorb] succesfully did UNSUBSCRIBE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097653
INFO [muorb] muorb test passed
| ___ \ \ \ / / / |
| |/ / \ V / / /| |
| __/ / \ / /| |
| | / /^\ \ ___ |
INFO [muorb] SLPI: Advertising remote topic log_message
_| / / |_/px4 starting.
INFO [parameters] Starting param sync THREADINFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-start 0
INFO [muorb] SLPI: Starting param sync THREAD
GPS: NONE
RC: SPEKTRUM
ESC: VOXL_ESC
POWER MANAGER: VOXLPM
DISTANCE SENSOR: NONE
OSD: DISABLE
EXTRA STEPS:
Running on M0054
INFO [muorb] SLPI: before starting the qshell_entry task
INFO [muorb] SLPI: Creating pthread qshellINFO [muorb] SLPI: qshell entry.....
INFO [muorb] SLPI: Successfully created px4 task PX4_qshell with tid 2097652
INFO [muorb] SLPI: Init app map initialized
INFO [muorb] SLPI: after starting the qshell_entry task
INFO [param] selected parameter default file /data/px4/param/parameters
INFO [muorb] SLPI: Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic
INFO [uORB] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic
INFO [muorb] SLPI: Advertising remote topic parameter_update
INFO [muorb] SLPI: Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_to
INFO [uORB] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic
INFO [muorb] SLPI: Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_to
INFO [uORB] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic
INFO [parameters] BSON document size 2516 bytes, decoded 2516 bytes (INT32:32, FLOAT:84)
INFO [logger] logger started (mode=all)
Starting IMU driver with no rotation
INFO [qshell] Send cmd: 'icm42688p start -s'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: icm42688p start -s
INFO [muorb] SLPI: arg0 = 'icm42688p'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-s'
INFO [muorb] SLPI: *** SPI Device ID 0x26000a 2490378
INFO [uORB] Advertising remote topic sensor_accel
INFO [uORB] Advertising remote topic sensor_gyro
INFO [muorb] SLPI: ICM42688P::probe successful!
INFO [muorb] SLPI: on SPI bus 1
INFO [muorb] SLPI: icm42688p #0 on SPI bus 1
INFO [muorb] SLPI:INFO [muorb] SLPI: >>> ICM42688P this: 3176e890
INFO [muorb] SLPI: Ok executing command: icm42688p start -s
INFO [uORB] Advertising remote topic qshell_retval
INFO [muorb] SLPI: >>> ICM42688P this: 3176e890
INFO [qshell] qshell return value timestamp: 769109146, local time: 769112405
INFO [muorb] SLPI: >>> ICM42688P this: 3176e890
INFO [muorb] SLPI: Register interrupt b21d31a4 e6201b9c 3176e890
INFO [uORB] Advertising remote topic sensor_gyro_fifo
INFO [uORB] Advertising remote topic sensor_accel_fifo
INFO [uORB] Advertising remote topic imu_server
INFO [qshell] Send cmd: 'icp101xx start -I -b 5'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: icp101xx start -I -b 5
INFO [muorb] SLPI: arg0 = 'icp101xx'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-I'
INFO [muorb] SLPI: arg3 = '-b'
INFO [muorb] SLPI: arg4 = '5'
INFO [muorb] SLPI: *** I2C Device ID 0xb76329 12018473
INFO [muorb] SLPI: icp101xx #0 on I2C bus 5
INFO [muorb] SLPI: address 0x63
INFO [muorb] SLPI:INFO [muorb] SLPI: Ok executing command: icp101xx start -I -b 5
INFO [qshell] qshell return value timestamp: 769151747, local time: 769152453
Looking for qmc5883l magnetometer
INFO [qshell] Send cmd: 'qmc5883l start -R 10 -X -b 1'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: qmc5883l start -R 10 -X -b 1
INFO [muorb] SLPI: arg0 = 'qmc5883l'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-R'
INFO [muorb] SLPI: arg3 = '10'
INFO [muorb] SLPI: arg4 = '-X'
INFO [muorb] SLPI: arg5 = '-b'
INFO [muorb] SLPI: arg6 = '1'
INFO [muorb] SLPI: *** I2C Device ID 0x80d09 527625
ERROR [muorb] SLPI: i2c probe failed
INFO [muorb] SLPI: PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] SLPI: Failed to execute command: qmc5883l start -R 10 -X -b 1
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 769197191, local time: 769199300
ERROR [qshell] Command failed
Looking for ist8310 magnetometer
INFO [muorb] SLPI: >>> ICM42688P this: 3176e890
INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: ist8310 start -R 10 -X -b 1
INFO [muorb] SLPI: arg0 = 'ist8310'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-R'
INFO [muorb] SLPI: arg3 = '10'
INFO [muorb] SLPI: arg4 = '-X'
INFO [muorb] SLPI: arg5 = '-b'
INFO [muorb] SLPI: arg6 = '1'
INFO [muorb] SLPI: *** I2C Device ID 0x60e09 396809
ERROR [muorb] SLPI: i2c probe failed
INFO [muorb] SLPI: PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] SLPI: Failed to execute command: ist8310 start -R 10 -X -b 1
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 769243333, local time: 769245843
ERROR [qshell] Command failed
Looking for ncp5623c RGB LED
INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
INFO [muorb] SLPI: arg0 = 'rgbled_ncp5623c'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-X'
INFO [muorb] SLPI: arg3 = '-b'
INFO [muorb] SLPI: arg4 = '1'
INFO [muorb] SLPI: arg5 = '-f'
INFO [muorb] SLPI: arg6 = '400'
INFO [muorb] SLPI: arg7 = '-a'
INFO [muorb] SLPI: arg8 = '56'
INFO [muorb] SLPI: *** I2C Device ID 0x7b3809 8075273
INFO [muorb] SLPI: Set i2c address 0x38, fd 3
ERROR [muorb] SLPI: i2c probe failed
INFO [muorb] SLPI: PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] SLPI: Failed to execute command: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 769289461, local time: 769290797
ERROR [qshell] Command failed
Starting VOXL ESC driver
INFO [qshell] Send cmd: 'voxl_esc start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: voxl_esc start
INFO [muorb] SLPI: arg0 = 'voxl_esc'INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic actuator_outputs
INFO [uORB] Advertising remote topic sensor_baro
INFO [muorb] SLPI: Ok executing command: voxl_esc start
INFO [muorb] SLPI: Opened UART ESC device
INFO [qshell] qshell return value timestamp: 769402896, local time: 769405483
Starting Spektrum RC
INFO [uORB] Advertising remote topic actuator_outputs_debug
INFO [uORB] Advertising remote topic esc_status
INFO [qshell] Send cmd: 'spektrum_rc start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: spektrum_rc start
INFO [muorb] SLPI: arg0 = 'spektrum_rc'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Creating pthread spektrum_rc_main
INFO [muorb] SLPI: Successfully created px4 task PX4_spektrum_rc_main with tid 2097644
INFO [muorb] SLPI: Ok executing command: spektrum_rc start
INFO [qshell] qshell return value timestamp: 769460341, local time: 769462971
INFO [qshell] Send cmd: 'voxlpm start -X -b 2'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: voxlpm start -X -b 2
INFO [muorb] SLPI: arg0 = 'voxlpm'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-X'
INFO [muorb] SLPI: arg3 = '-b'
INFO [muorb] SLPI: arg4 = '2'
INFO [muorb] SLPI: *** I2C Device ID 0xd24411 13779985
INFO [muorb] SLPI: Set i2c address 0x6a, fd 4
Received standard error event 2
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'sensors start'
Received standard error event 2
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'ekf2 start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'mc_pos_control start'
Received standard error event 2
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'mc_att_control start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Received standard error event INFO [qshell] Send cmd: 'mc_rate_control start'
2
Received standard error event 2
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'mc_autotune_attitude_control start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'land_detector start multicopter'
Received standard error event 2
Received standard error event 2
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'manual_control start'
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'control_allocator start'
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2
Received standard error event 2 -
M0014 vs M0149 tracking cameras for indoor VIOposted in Ask your questions right here!
Hello,
I was searching through the product catalog and was wondering what the difference between the M0014 and M0149 cameras for indoor flight were. I see that the M0149 module is higher quality resolution, but there isn't much else on this specific sensor.
What are the main advantages of the M0149 over the M0014, does it provide a higher quality position hold with less risk for fall back?
-
RE: voxl-px4 service pipeline uORB failureposted in VOXL 2
Alex, picking up this thread where swickliff left off. We tried a full partion wipe and are still having issues. Attached to this post is a .txt file with the entire PX4 startup output from command to crash.
voxl2:/$ voxl-px4
[INFO] Reading from /etc/modalai/voxl-px4.conf
Found DSP signature file
[INFO] Daemon mode enabled
GPS=AUTODETECT
RC=CRSF_RAW
ESC=VOXL_ESC
POWER MANAGER=VOXLPM
DISTANCE SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=ENABLE
SENSOR_CAL=ACTUAL
EXTRA STEPS:
INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM.
INFO [px4] assuming working directory is rootfs, no symlinks needed.
INFO [muorb] Got muorb init command
Sending initialization request
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
INFO [muorb] SLPI: muorb aggregator thread running
INFO [muorb] muorb protobuf initalize method succeeded
INFO [muorb] succesfully did ADVERTISE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097656
INFO [muorb] succesfully did SUBSCRIBE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097655
INFO [muorb] succesfully did TOPIC_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097654
INFO [muorb] succesfully did UNSUBSCRIBE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097653
INFO [muorb] muorb test passed
| ___ \ \ \ / / / |
| |/ / \ V / / /| |
| __/ / \ / /| |
| | / /^\ \ ___ |
_| / / |_/px4 starting.
INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-start 0
INFO [muorb] SLPI: Advertising remote topic log_message
INFO [parameters] Starting param sync THREAD
INFO [muorb] SLPI: Starting param sync THREAD
GPS: AUTODETECT
RC: CRSF_RAW
ESC: VOXL_ESC
POWER MANAGER: VOXLPM
DISTANCE SENSOR: NONE
OSD: DISABLE
EXTRA STEPS:
Running on M0054
INFO [muorb] SLPI: before starting the qshell_entry task
INFO [muorb] SLPI: Creating pthread qshellINFO [muorb] SLPI: Successfully created px4 task PX4_qshell with tid 2097652
INFO [muorb] SLPI: qshell entry.....
INFO [muorb] SLPI: after starting the qshell_entry task
INFO [muorb] SLPI: Init app map initialized
INFO [param] selected parameter default file /data/px4/param/parameters
INFO [muorb] SLPI: Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic
INFO [uORB] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic
INFO [muorb] SLPI: Advertising remote topic parameter_update
INFO [muorb] SLPI: Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_to
INFO [uORB] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic
INFO [muorb] SLPI: Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_to
INFO [uORB] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic
INFO [parameters] BSON document size 1509 bytes, decoded 1509 bytes (INT32:29, FLOAT:41)
INFO [logger] logger started (mode=all)
Starting IMU driver with no rotation
INFO [qshell] Send cmd: 'icm42688p start -s'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: icm42688p start -s
INFO [muorb] SLPI: arg0 = 'icm42688p'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-s'
INFO [muorb] SLPI: *** SPI Device ID 0x26000a 2490378
INFO [uORB] Advertising remote topic sensor_accel
INFO [uORB] Advertising remote topic sensor_gyro
INFO [muorb] SLPI: ICM42688P::probe successful!
INFO [muorb] SLPI: on SPI bus 1
INFO [muorb] SLPI: icm42688p #0 on SPI bus 1
INFO [muorb] SLPI:INFO [muorb] SLPI: >>> ICM42688P this: 3176c8a0
INFO [muorb] SLPI: Ok executing command: icm42688p start -s
INFO [uORB] Advertising remote topic qshell_retval
INFO [muorb] SLPI: >>> ICM42688P this: 3176c8a0
INFO [qshell] qshell return value timestamp: 380545341, local time: 380552974
INFO [muorb] SLPI: >>> ICM42688P this: 3176c8a0
INFO [muorb] SLPI: Register interrupt b21d3364 e6201b9c 3176c8a0
INFO [uORB] Advertising remote topic sensor_gyro_fifo
INFO [uORB] Advertising remote topic sensor_accel_fifo
INFO [uORB] Advertising remote topic imu_server
INFO [qshell] Send cmd: 'icp101xx start -I -b 5'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: icp101xx start -I -b 5
INFO [muorb] SLPI: arg0 = 'icp101xx'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-I'
INFO [muorb] SLPI: arg3 = '-b'
INFO [muorb] SLPI: arg4 = '5'
INFO [muorb] SLPI: *** I2C Device ID 0xb76329 12018473
INFO [muorb] SLPI: icp101xx #0 on I2C bus 5
INFO [muorb] SLPI: address 0x63
INFO [muorb] SLPI:INFO [muorb] SLPI: Ok executing command: icp101xx start -I -b 5
INFO [qshell] qshell return value timestamp: 380601909, local time: 380603599
Looking for qmc5883l magnetometer
INFO [qshell] Send cmd: 'qmc5883l start -R 10 -X -b 1'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: qmc5883l start -R 10 -X -b 1
INFO [muorb] SLPI: arg0 = 'qmc5883l'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-R'
INFO [muorb] SLPI: arg3 = '10'
INFO [muorb] SLPI: arg4 = '-X'
INFO [muorb] SLPI: arg5 = '-b'
INFO [muorb] SLPI: arg6 = '1'
INFO [muorb] SLPI: *** I2C Device ID 0x80d09 527625
INFO [muorb] SLPI: >>> ICM42688P this: 3176c8a0
ERROR [muorb] SLPI: i2c probe failed
INFO [muorb] SLPI: PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] SLPI: Failed to execute command: qmc5883l start -R 10 -X -b 1
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 380665246, local time: 380666868
ERROR [qshell] Command failed
Looking for ist8310 magnetometer
INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: ist8310 start -R 10 -X -b 1
INFO [muorb] SLPI: arg0 = 'ist8310'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-R'
INFO [muorb] SLPI: arg3 = '10'
INFO [muorb] SLPI: arg4 = '-X'
INFO [muorb] SLPI: arg5 = '-b'
INFO [muorb] SLPI: arg6 = '1'
INFO [muorb] SLPI: *** I2C Device ID 0x60e09 396809
ERROR [muorb] SLPI: i2c probe failed
INFO [muorb] SLPI: PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] SLPI: Failed to execute command: ist8310 start -R 10 -X -b 1
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 380701724, local time: 380702898
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'gps start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: gps start
INFO [muorb] SLPI: arg0 = 'gps'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Creating pthread gps
INFO [muorb] SLPI: Successfully created px4 task PX4_gps with tid 2097647
INFO [muorb] SLPI: Ok executing command: gps start
INFO [qshell] qshell return value timestamp: 380731993, local time: 380733860
Looking for ncp5623c RGB LED
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56'
INFO [muorb] SLPI: qshell gotten: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
INFO [muorb] SLPI: arg0 = 'rgbled_ncp5623c'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-X'
INFO [muorb] SLPI: arg3 = '-b'
INFO [muorb] SLPI: arg4 = '1'
INFO [muorb] SLPI: arg5 = '-f'
INFO [muorb] SLPI: arg6 = '400'
INFO [muorb] SLPI: arg7 = '-a'
INFO [muorb] SLPI: arg8 = '56'
INFO [muorb] SLPI: *** I2C Device ID 0x7b3809 8075273
INFO [muorb] SLPI: Set i2c address 0x38, fd 3
ERROR [muorb] SLPI: i2c probe failed
INFO [muorb] SLPI: PX4_qshell: no instance started (no device on bus?)
ERROR [muorb] SLPI: Failed to execute command: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
INFO [qshell] cmd returned with: -1
INFO [qshell] qshell return value timestamp: 380774191, local time: 380776550
ERROR [qshell] Command failed
Starting VOXL ESC driver
INFO [uORB] Advertising remote topic sensor_baro
INFO [qshell] Send cmd: 'voxl_esc start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: voxl_esc start
INFO [muorb] SLPI: arg0 = 'voxl_esc'INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic actuator_outputs
INFO [muorb] SLPI: Ok executing command: voxl_esc start
INFO [muorb] SLPI: Opened UART ESC device
INFO [qshell] qshell return value timestamp: 380907621, local time: 380909607
Starting CRSF RC driver
INFO [uORB] Advertising remote topic esc_status
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [qshell] Send cmd: 'crsf_rc start -d 7'
INFO [muorb] SLPI: qshell gotten: crsf_rc start -d 7
INFO [muorb] SLPI: arg0 = 'crsf_rc'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-d'
INFO [muorb] SLPI: arg3 = '7'
INFO [muorb] SLPI: Ok executing command: crsf_rc start -d 7
INFO [muorb] SLPI: Crsf serial opened sucessfully
INFO [muorb] SLPI: Crsf serial is single wire. Telemetry disabled
INFO [uORB] Advertising remote topic input_rc
INFO [qshell] qshell return value timestamp: 380966325, local time: 380968275
INFO [qshell] Send cmd: 'voxlpm start -X -b 2'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: voxlpm start -X -b 2
INFO [muorb] SLPI: arg0 = 'voxlpm'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-X'
INFO [muorb] SLPI: arg3 = '-b'
INFO [muorb] SLPI: arg4 = '2'
INFO [muorb] SLPI: *** I2C Device ID 0xd24411 13779985
INFO [muorb] SLPI: baudrate set to 9600
INFO [muorb] SLPI: Sending initial CFG_VALSET. Attempt: 1
INFO [muorb] SLPI: Sending initial CFG_VALSET. Attempt: 2
INFO [muorb] SLPI: Sending initial CFG_VALSET. Attempt: 3
INFO [muorb] SLPI: Set i2c address 0x6a, fd 4
INFO [muorb] SLPI: baudrate set to 9600
INFO [muorb] SLPI: Sending initial CFG_VALSET. Attempt: 1
INFO [muorb] SLPI: Sending initial CFG_VALSET. Attempt: 2
terminate called after throwing an instance of 'qmi_error'
what(): qmi_client_send_msg_sync() failed, (client_id=)0, result=0: qmi error (-16)
/usr/bin/voxl-px4: line 147: 5263 Aborted GPS=$GPS RC=$RC ESC=$ESC POWER_MANAGER=$POWER_MANAGER DISTANCE_SENSOR=$DISTANCE_SENSOR OSD=$OSD EXTRA_STEPS=$EXTRA_STEPS px4 $DAEMON -s /usr/bin/voxl-px4-start
voxl2:/$ ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running
ERROR [px4] PX4 server not running -
RE: VOXL 2 IO Board troubleshooting - Driver will not startposted in VOXL 2 IO
@Alex-Kushleyev I appreciate it, all is working now
-
RE: VOXL 2 IO Board troubleshooting - Driver will not startposted in VOXL 2 IO
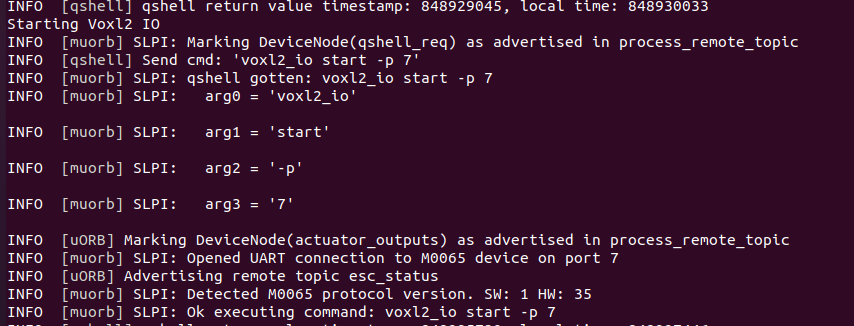
@Eric-Katzfey I'm not looking to run RC through the IO board, I'm using external RC commands for control. I'm looking to utilize the PWM outputs on the board to control a servo for a dropper mechanism. I made the change and am commanding the start of the voxl2_io driver successfully. As of now I am still unable to drive a servo through the QGC actuators tab, all the correct parameters have been loaded.
-
RE: VOXL 2 IO Board troubleshooting - Driver will not startposted in VOXL 2 IO
@Jeremy-Frederick Alex, thanks for the quick response. It looks like PX4 is still expecting to find the IO board on port 2, where do I need to update the uart number? Originally I thought updating the UART number in the flashing bash script was all that is necessary but now I see why that was an incorrect assumption.

-
RE: Mavlink camera Manager (0.9) functionality in SDK 1.0.0posted in VOXL SDK
@Eric-Katzfey This is working great, been playing around with it for the last week or so. The next thing I'll be working on will be the order in which the cameras streams are displayed to QGC. It seems right now on boot the initial stream that comes up in randomized over the various camera being fed into QGC.
-
VOXL 2 IO Board troubleshooting - Driver will not startposted in VOXL 2 IO
Hello,
I just received my new VOXL IO board with the updated bootloader and I'm working to integrate it now. Here is an explanation of my setup and the programming steps I've taken so far.
Goal:
Manipulate a servo using the VOXL IO board's PWM output.Setup:
VOXL2 running SDK 1.1.2, VOXL IO board with latest bootloader, plugged into port J19, VOXL_ESC for ESC and EXTERNAL for RC command.Programming Steps:
Flashed the updated firmware with the UART 7 edit made for J19 utilization, flashed the voxl_io parameters using the px4-configure wizard. Everything during this process seems to have worked fine.Issue:
Whenever I try to start the voxl2_io driver, I receive the following: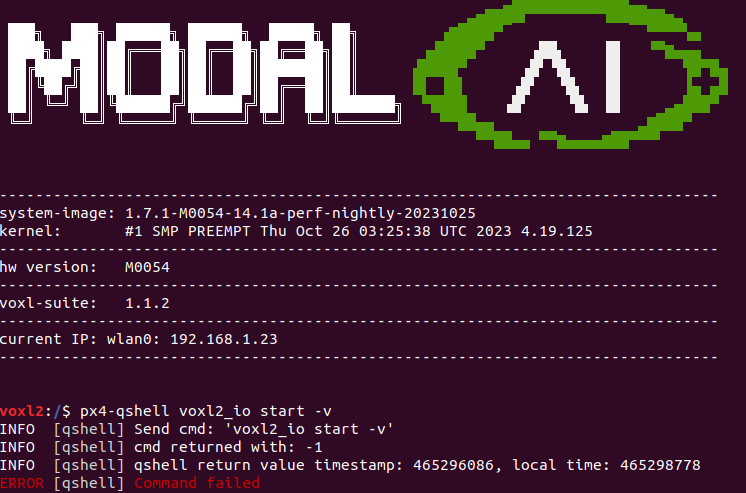
-
Tips For Reducing the amount of time the microhard modems take to connectposted in Microhard Modems
Working with the pMDDL 2350 modems with VOXL 2 and SDK 1.1.2.
Currently we're experiencing anywhere from 45-90 second connection times before a link is made between QGC and VOXL. I was wondering if the community had any tips on reducing this connection time at all through the configuration.
-
RE: Support for Video to Parent Computer through QGCposted in Feature Requests
@Eric-Katzfey Apologies I missed a typo in the topic line, what I meant to ask was in regards to support for recording video through QGC and saving it to the parent computer instead of locally on the VOXL 2.
-
Support for Video to Parent Computer through QGCposted in Feature Requests
Just wanted to check in on this feature and see when it will be supported.