@RichieRich
GPS unit is mounted by default (as it comes with RB5 5G drone), mast is locked in vertical postion.
Turning EKF2_REQ_SACC to 0,75 provided no errors from GPS.
Obstacle avoidance was also disabled, so we managed to fly.
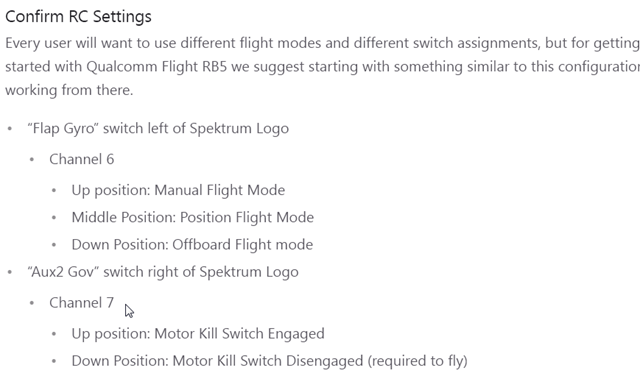
But I'm still a bit confused why the obstacle avoidance gives error, since the drone was placed on the ground (concrete pavement), no obstacles within few meters, while the minimum distance was set to only 1 m. But this is current setup that works:
[image: 1649438004385-0de5d598-3401-4512-9e7b-3ef8202ef635-image.png]
Many thanks for your help. We'll try to figure this out and provide info in a few days.