Hi @Alex-Gardner,
Am using ModalAI 3.3.0 version. I have connected my voxel camera kit with ros & able to visualise dfs_disparity/image_raw topic, stereo_left/image_raw, dfs_pointcloud topics data on Rviz. I have placed a obstacle in front of camera & at same time i tried visualise obstacle data on /dfs_disparity/image_raw topic. Observed that the data appears on dfs_disparity/image_raw topic was not clear and may due to this am getting very low density pointcloud points on /dfs_pointcloud topic. I have attached the rviz images which have taken during experiment.(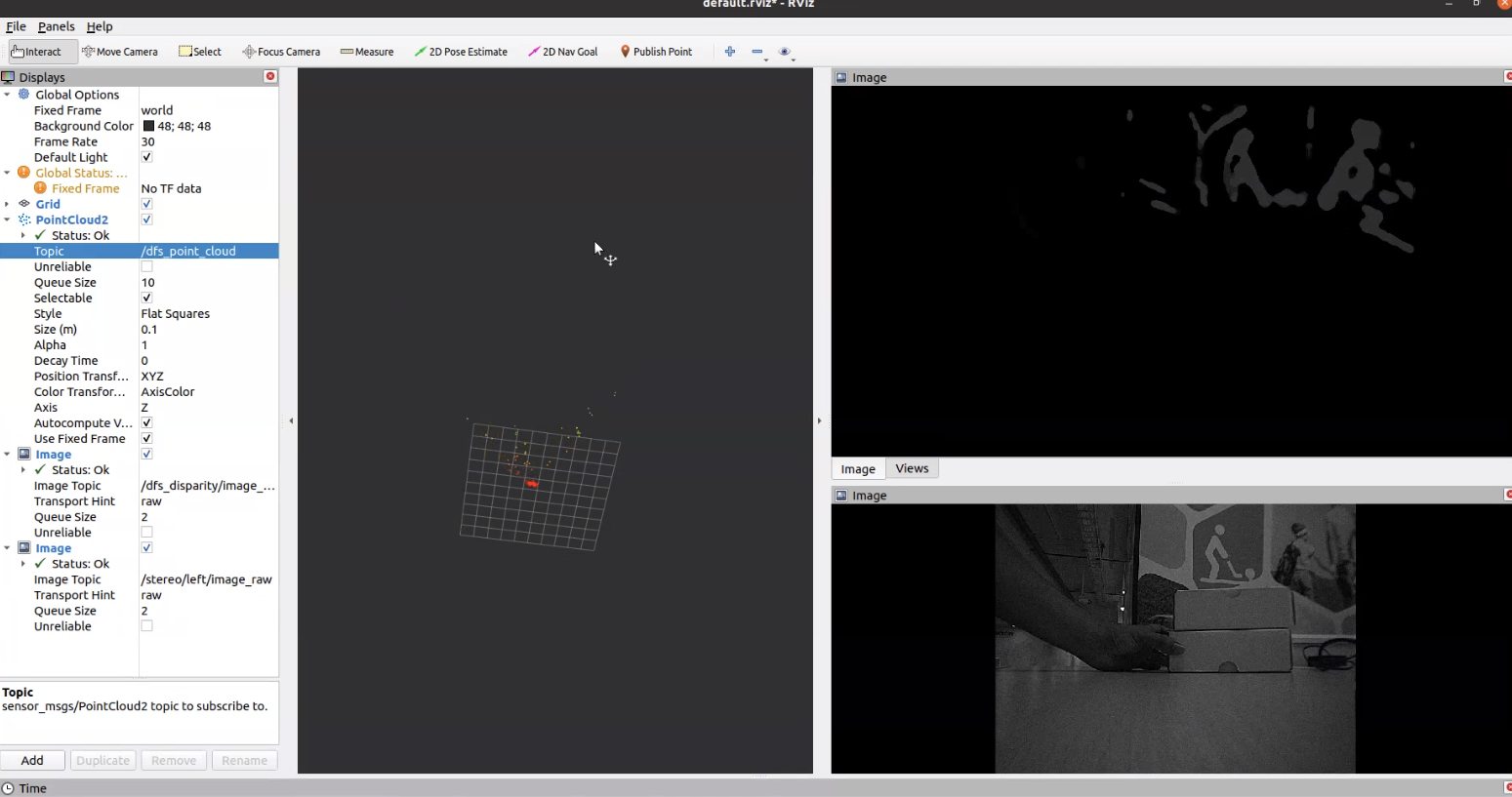
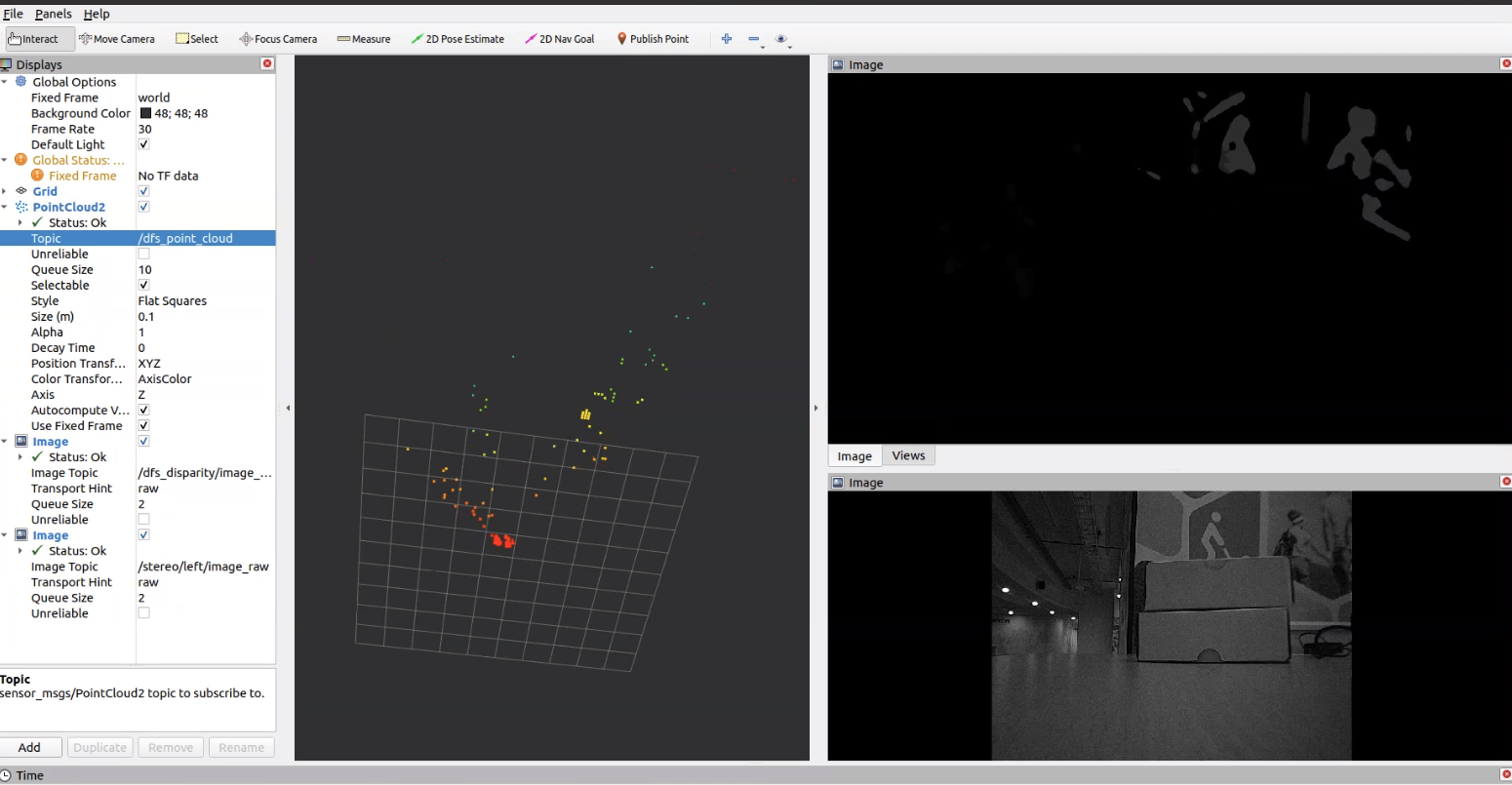 image url)
image url)
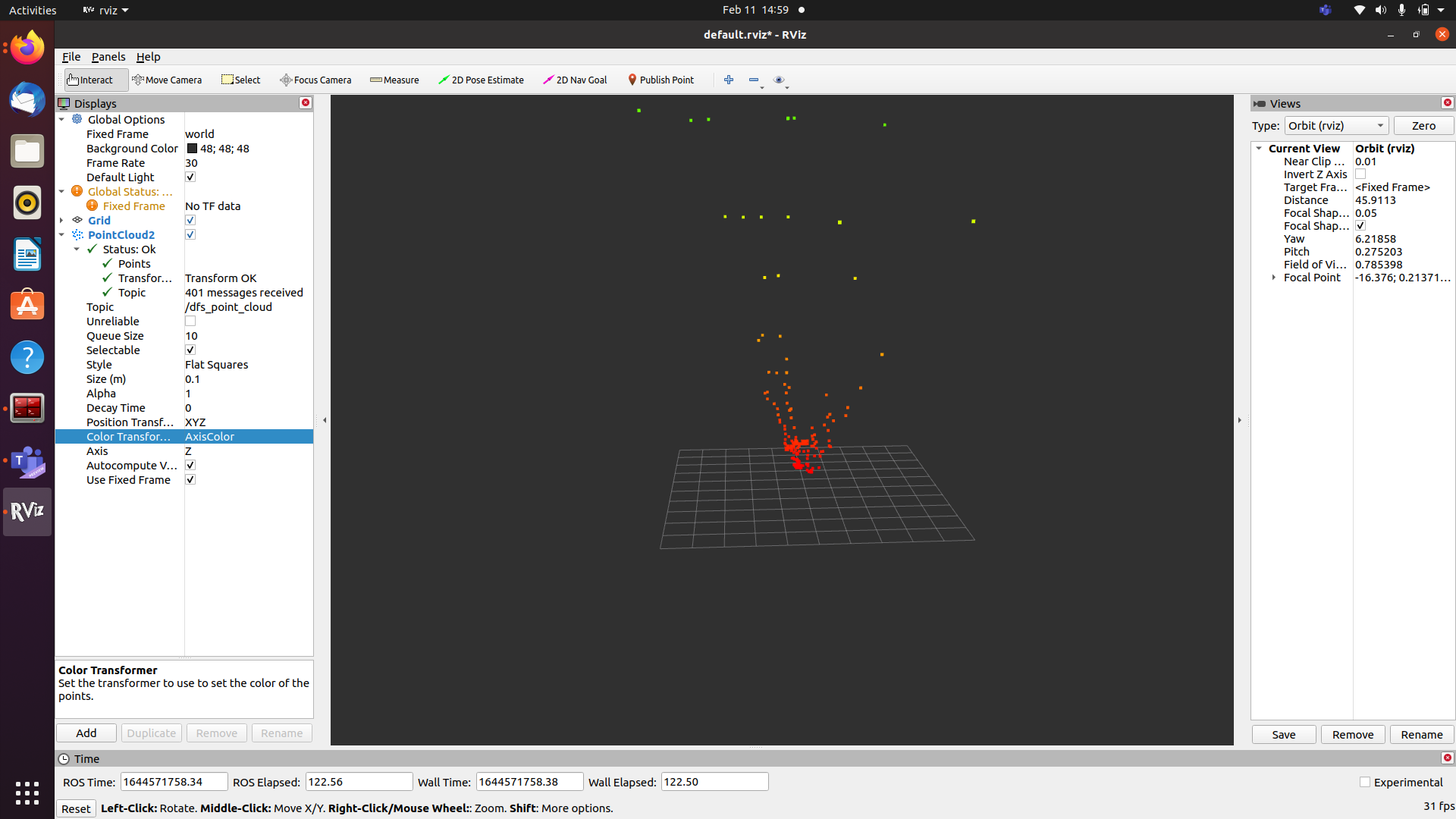 image url).
image url).