@Zachary-Lowell-0 I said yesterday that echoing the /fmu/out topics only worked if voxl-px4 was disabled on startup and run in a terminal with voxl-px4. This no longer appears to be the case, although I don't know what changed from yesterday to cause this. Now ros2 topic echo can print those topics when px4 is launched at startup. However, the topics still don't print the data I would expect if the drone were correctly reading the data I publish to /fmu/in/visual_odometry, unchanged from yesterday.
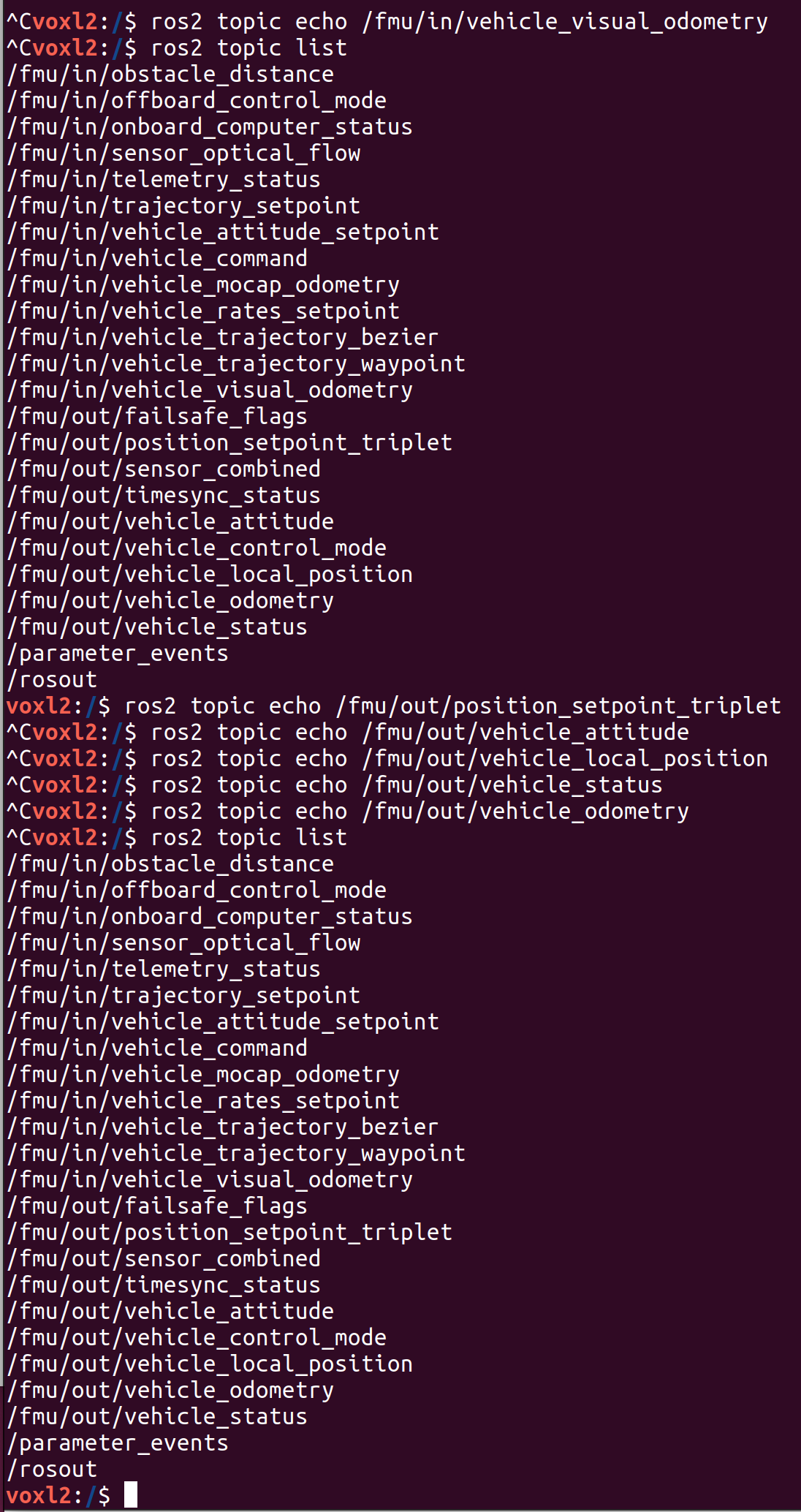
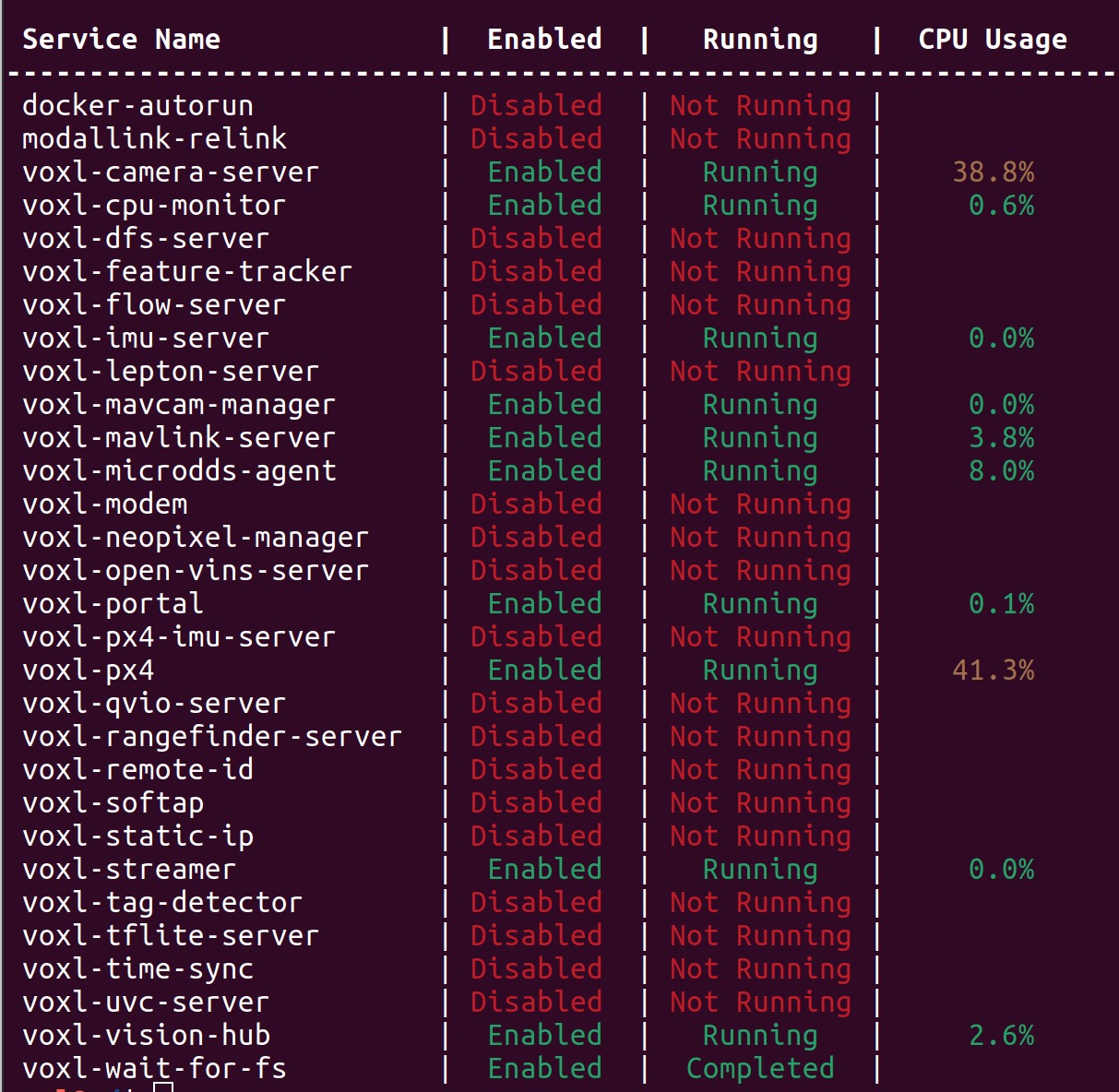
The qvio server was on. I disabled it, but that didn't fix the issue of the drone not using the data from /fmu/in/vehicle_visual_odometry. I believe that shutting down this server should disable VIO, correct? This is the output after disabling qvio server and having px4 enabled to launch at startup.
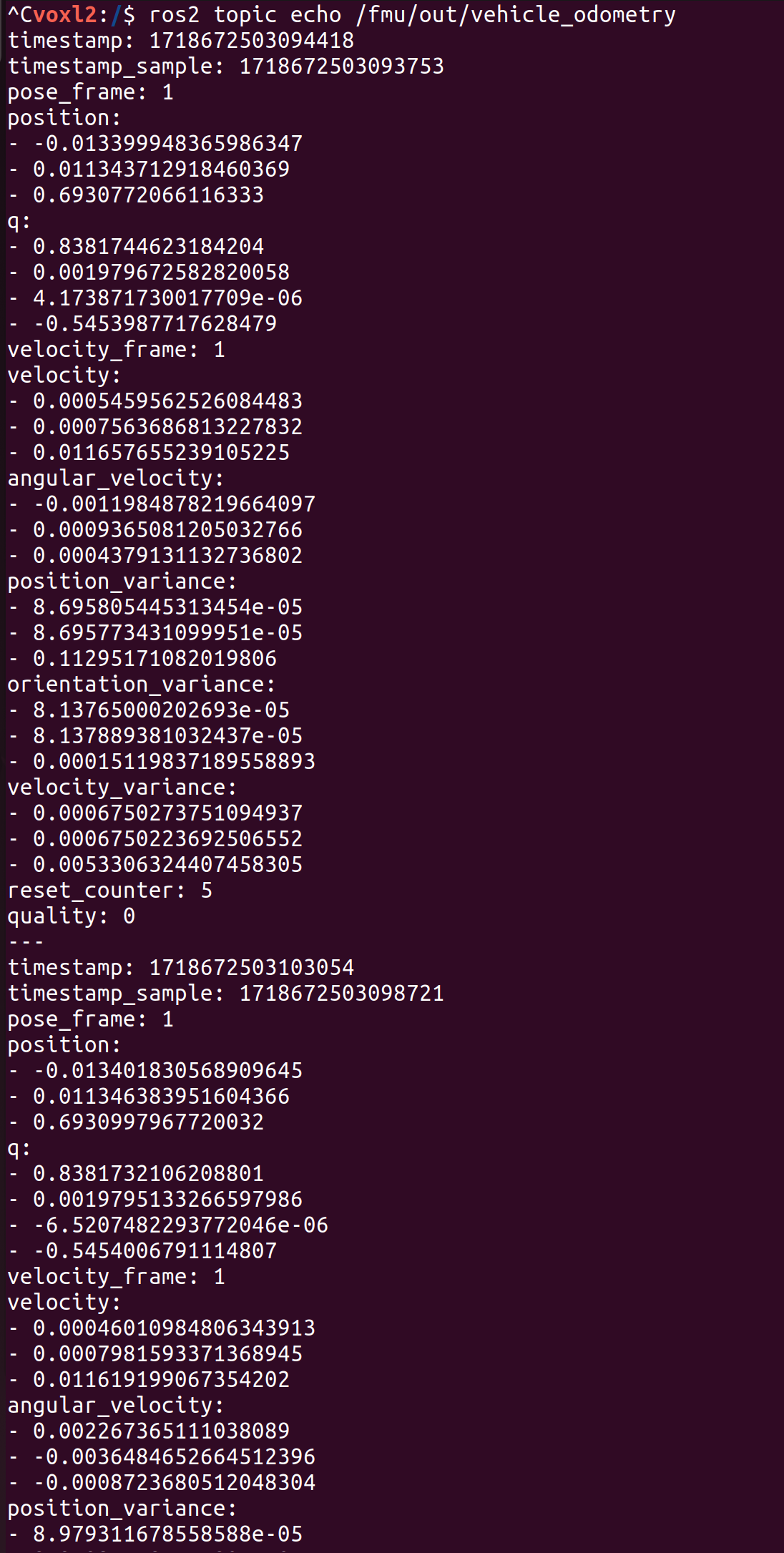
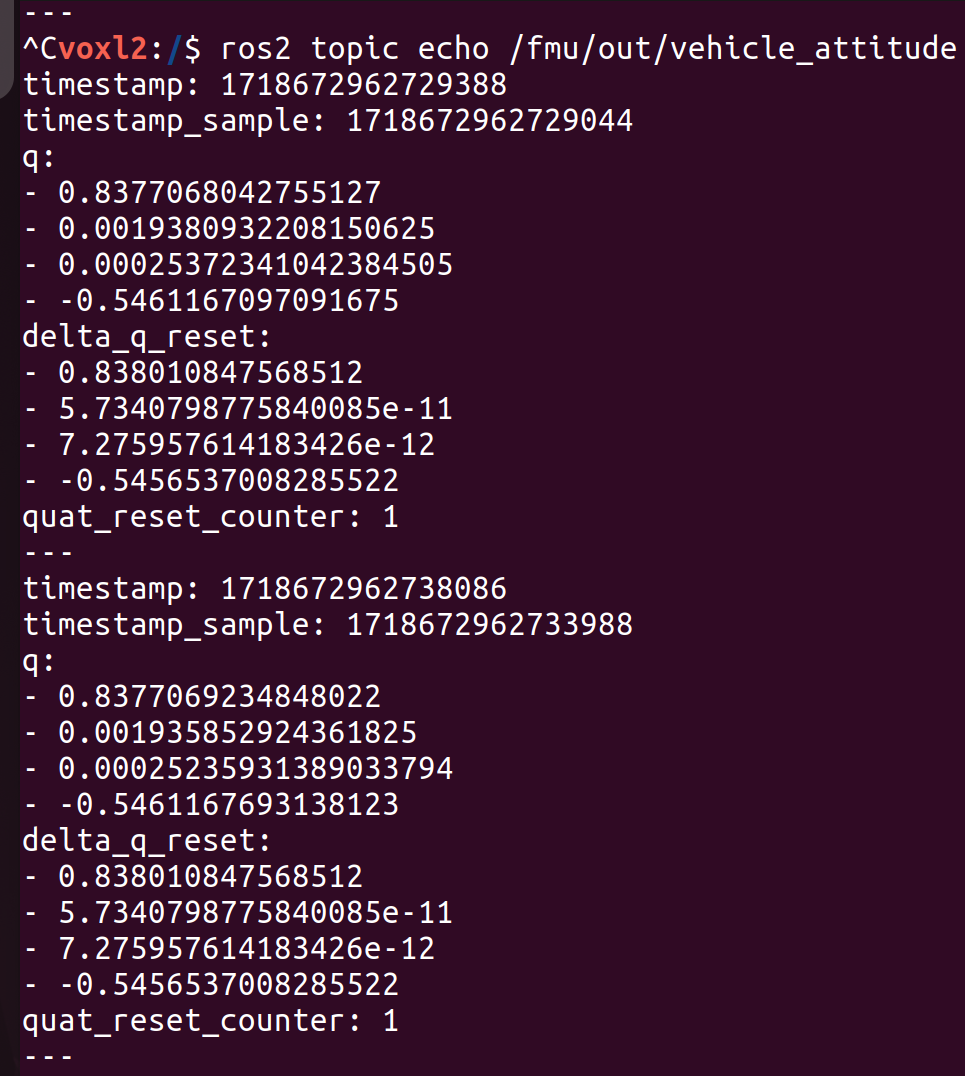
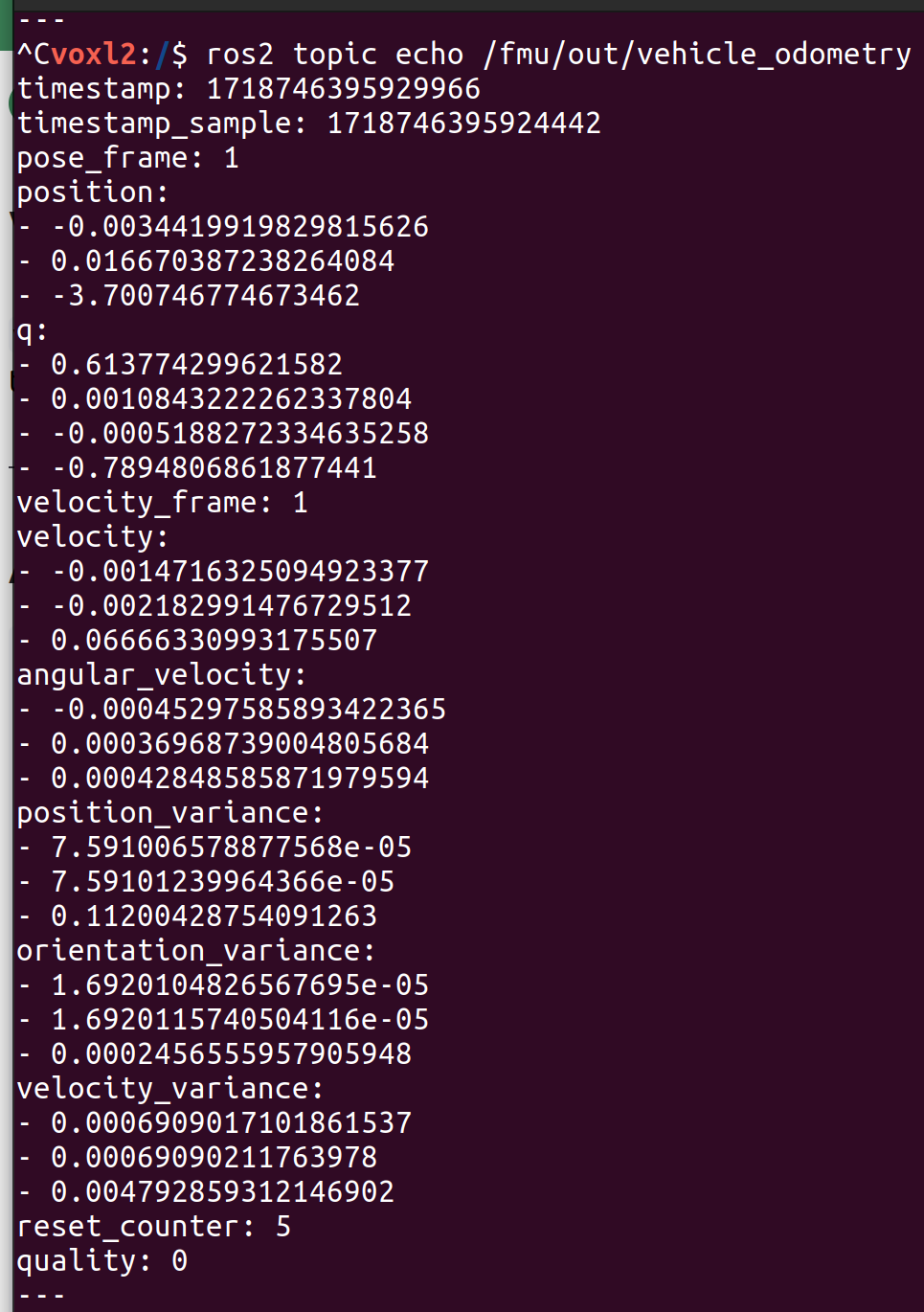
Here is the output of /fmu/out/vehicle odometry when I am not publishing to /fmu/in/vehicle_visual_odometry
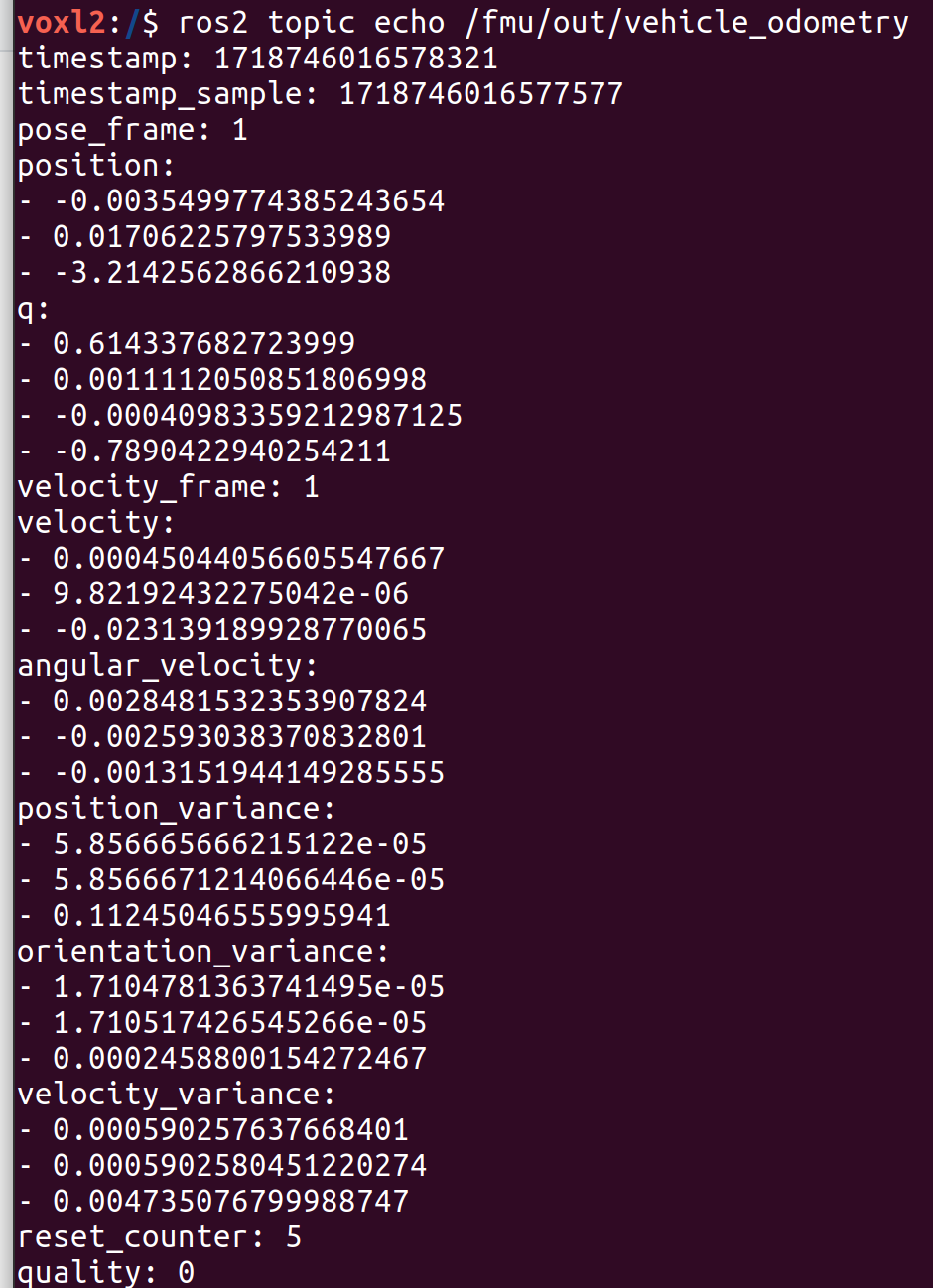
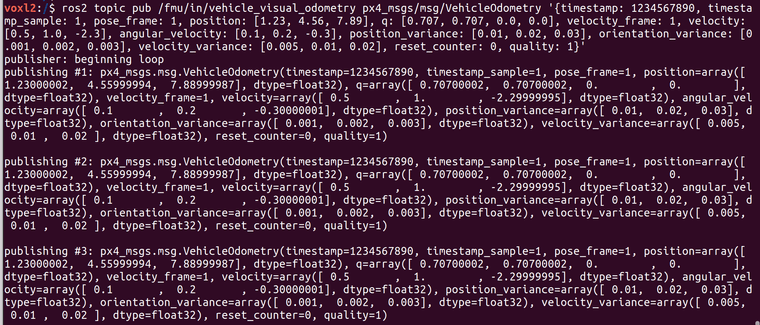
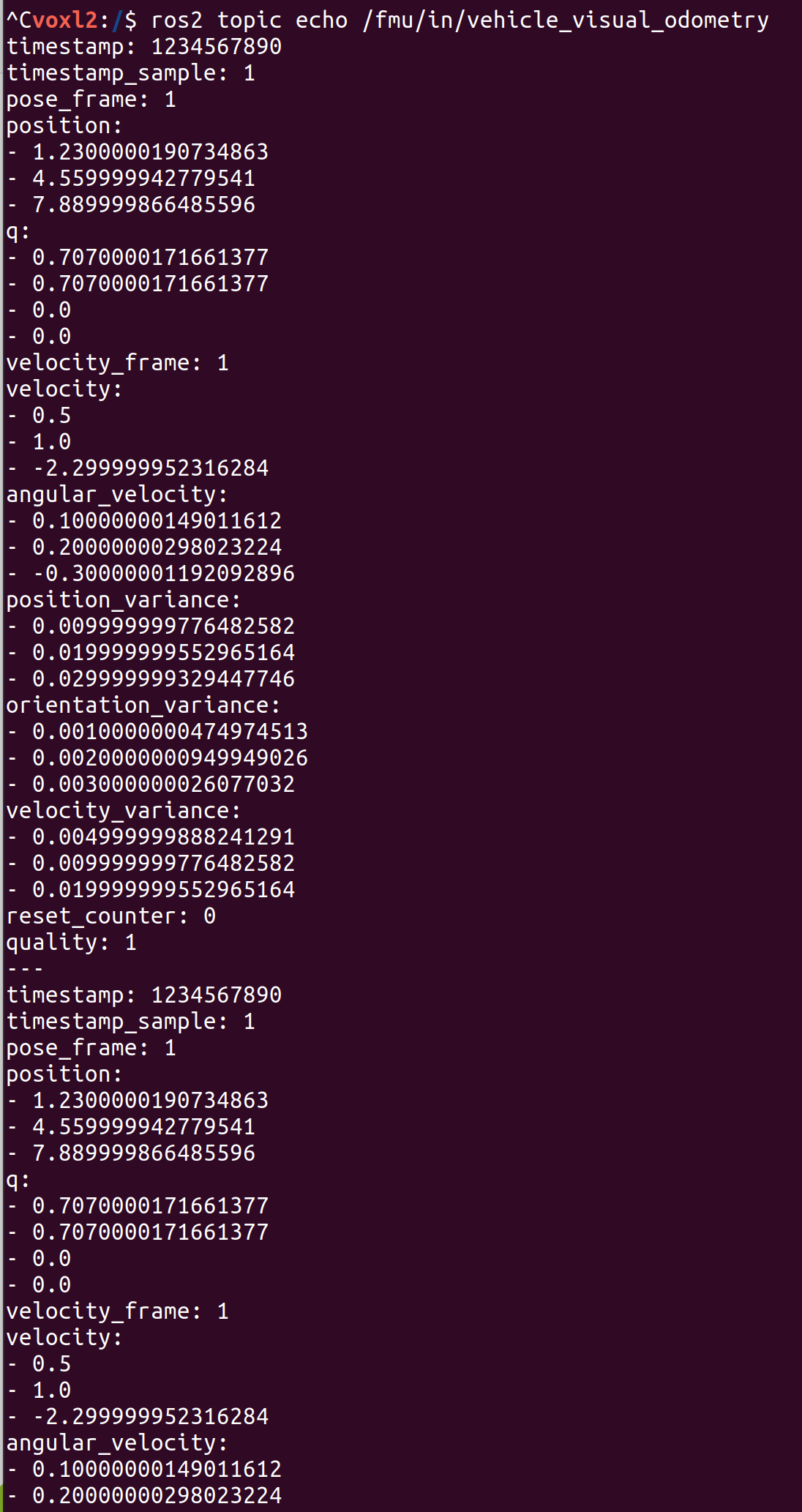
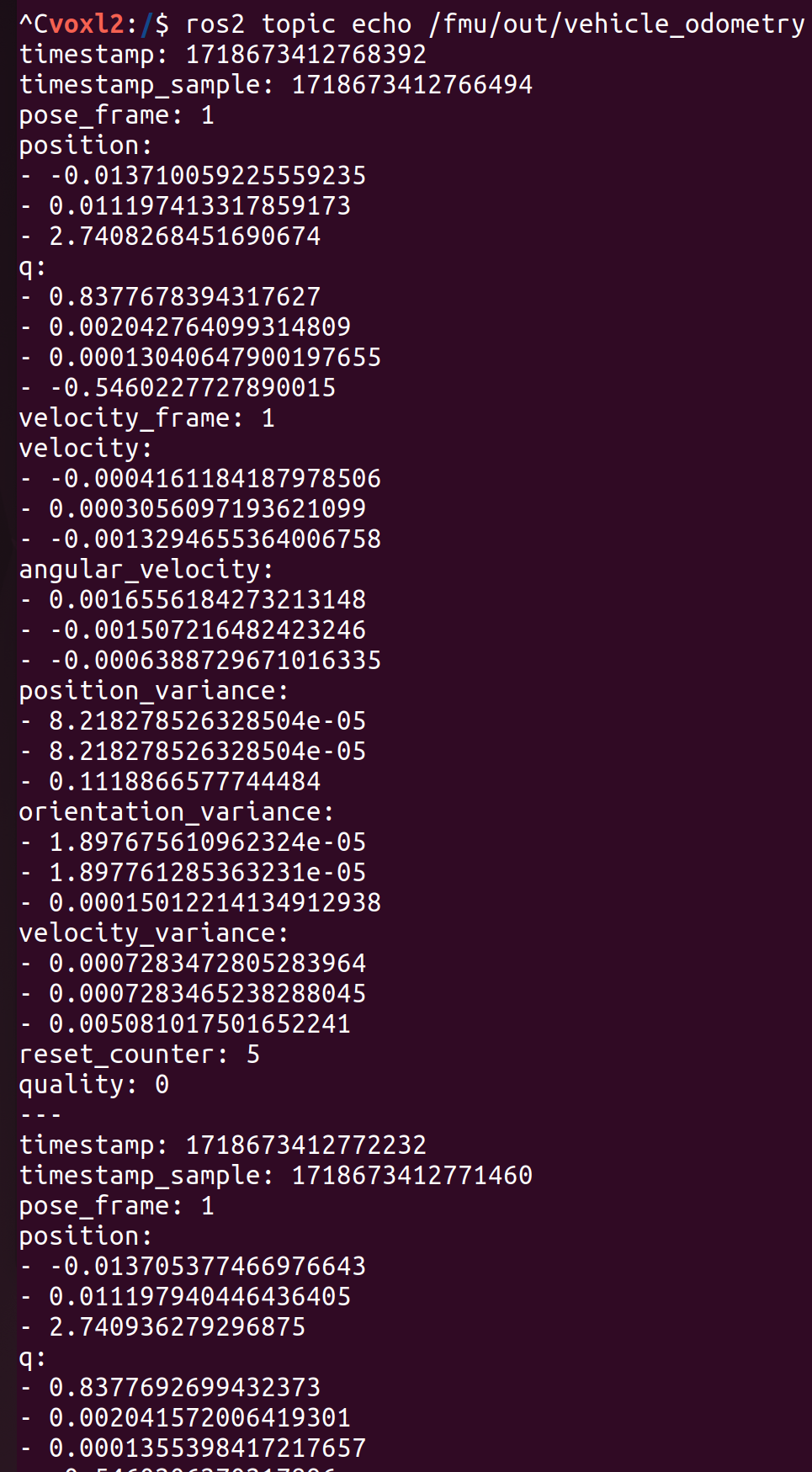
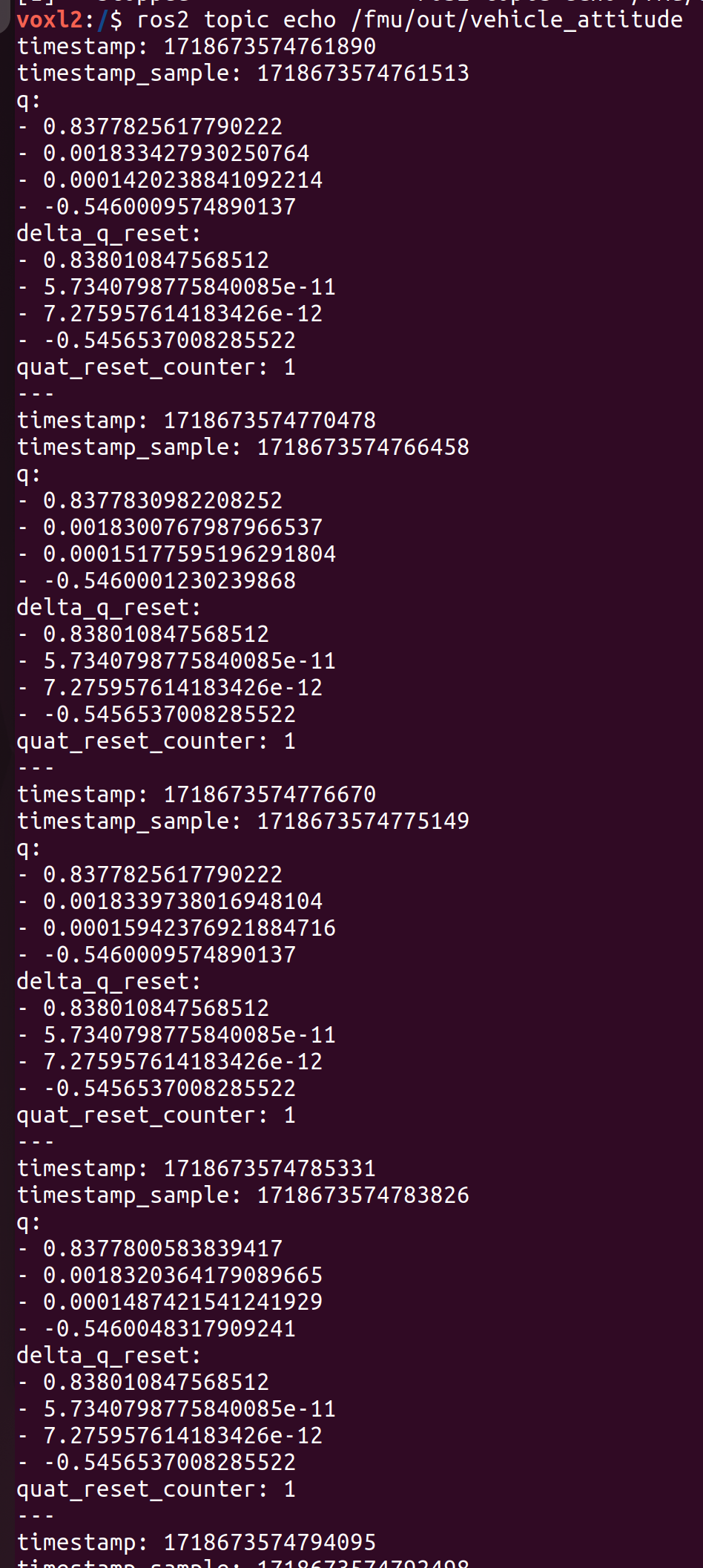
And here is the output when I am publishing to it using the command topic pub /fmu/in/vehicle_visual_odometry px4_msgs/msg/VehicleOdometry '{timestamp: 1234567890, timestamp_sample: 1, pose_frame: 1, position: [1.23, 4.56, 7.89], q: [0.707, 0.707, 0.0, 0.0], velocity_frame: 1, velocity: [0.5, 1.0, -2.3], angular_velocity: [0.1, 0.2, -0.3], position_variance: [0.01, 0.02, 0.03], orientation_variance: [0.001, 0.002, 0.003], velocity_variance: [0.005, 0.01, 0.02], reset_counter: 0, quality: 1}' which is supposed to provide it with test mocap data.
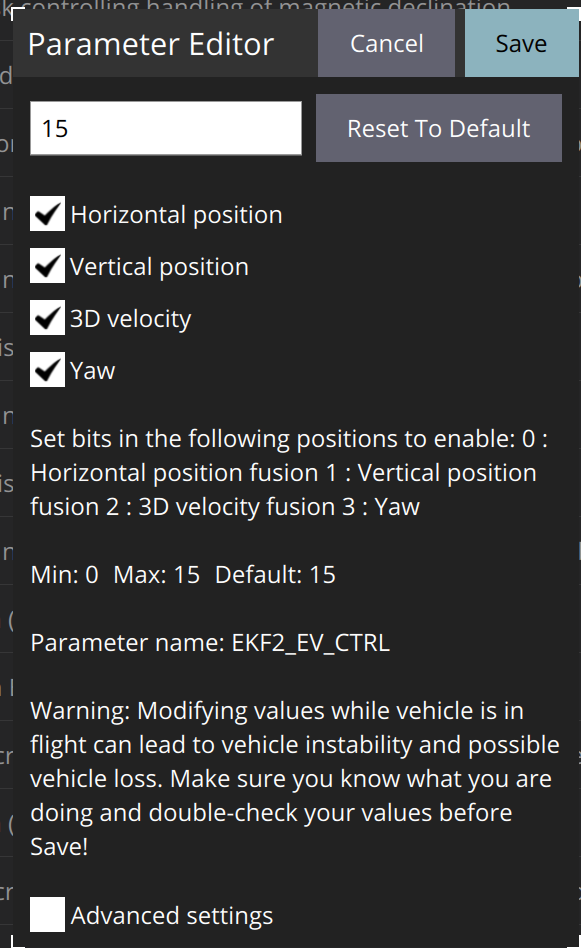
This is the value of ekf2_ev_ctrl from QGroundControl.