Dear sir or madam,
This is my first post to the ModalAI forum.
I have some rudimentary questions, but I would appreciate it if you could help me out.
I have the following 6 questions. I would appreciate it if you could answer as soon as possible, especially the Question 1.
Here is the configuration of my VOXL CAM+ TOF Dev Kit and a drone;
[VOXL CAM+ TOF Setup]
- system-image: 4.0.0
- kernel: #1 SMP PREEMPT Thu Oct 13 17:57:05 UTC 2022 3.18.71-perf
- hw version: VOXL
- voxl-suite: 0.9.5
The way I install the VOXL CAM on a drone is,
[https://ardupilot.org/copter/docs/common-modalai-voxl.html](link url)
i.e. the VOXL CAM is attached to the front of the aircraft as shown in the figure in the ModalAI VOXL.
For the initial setup of VOXL CAM, I refered;
[https://docs.modalai.com/voxl-cam-user-guide-core/](link url)
[https://ardupilot.org/copter/docs/common-modalai-voxl.html](link url)
The flight controller is based on Ardupilot Copter's Quad X, using Mission Planner as the ground control interface.
Question 1.
My drone with VOXL CAM flies hovering in Loiter mode in a bright room with lots of features, sometimes it works correctly, sometimes not.
When the hovering control fails, "Bad Vision Position" and/or "Visual Odometry: not healthy" appear in Mission Planner.
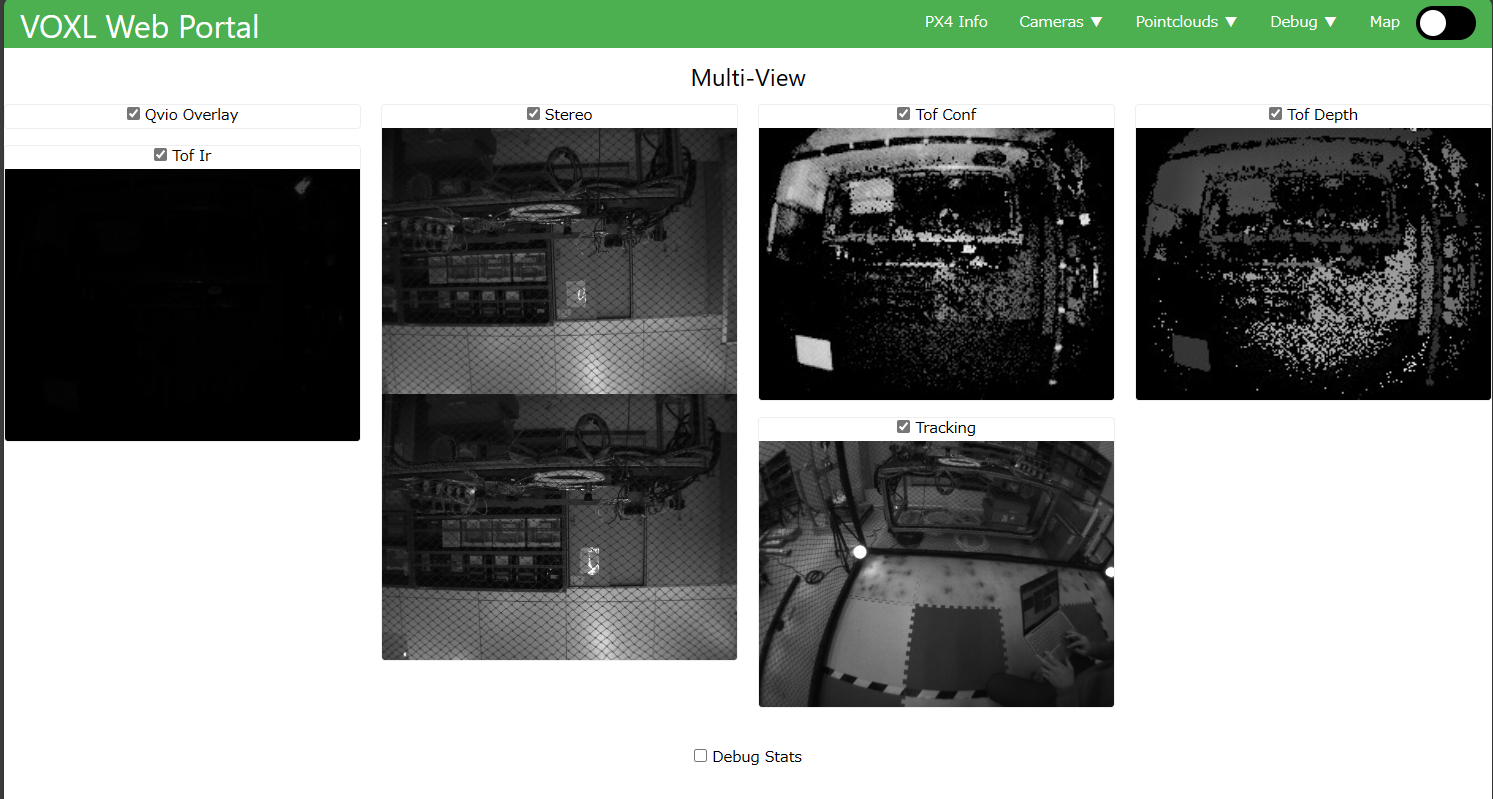
When these errors are displayed, I looked at the status of the VOXL CAM in the Voxl portal and confirmed that only "qvio overlay" was not displayed (and also loss of the IMU data). Therefore, I am guessing that the reason is that the visual odometry could not be calculated on the VOXL CAM and the signal could not be sent to the flight controller. What is the best way to solve this problem?
In addition, considering the possibility of the overheat, I also checked the CPU temperature of the VOXLCAM, but it was between 50°C and 70°C both when the hovering control was operating correctly and when it was not.
If you can think of problems other than the above, it would be helpful to know the causes and countermeasures.
Question 2.
Could you tell me what triggers the "Bad Vision Position" and "Visual Odometry: not healthy" errors in Mission Planner?
Question 3.
What signals are sent from the VOXL CAM to the flight controller?
Is it just the Visual Odometry?
Question 4.
What are the power supply specifications for proper operation of the VOXL CAM?
Rated voltage: 5V, rated current: about 1A? Is that correct?
I would like to confirm the rated current value, as I have not found it listed.
What is the maximum current consumption?
Question 5.
What is the maximum allowable temperature of the CPU and GPU of the VOXL CAM at which can operate properly? I am considering whether or not to install a cooling fan to prevent overheat even when the drone is stationary or hovering, and would like to use this as a reference.
Question 6.
When I check the images acquired by the VOXL CAM using the MultiView of voxl-portal or rqt of ROS, the Stereo Camera image and the ToF sensor image are upside down since the first time I purchased the VOXL CAM. Is this normal?
Note that Qvio overlay and tracking are not inverted.
By the way, I have two VOXL CAMs on hand, and they are a little different from the above, in that the Stereo Camera image is not flipped upside down, only the ToF sensor image is flipped upside down. Why do the Stereo Camera images look different on the same VOXL CAM?
Which one is normal and how should I correct it?
Thank you in advance for your time.
I am waiting for your advise.