2 drones, simultaneous fly individual flight plan and telemetry logging
-
Hi @MaxG ,
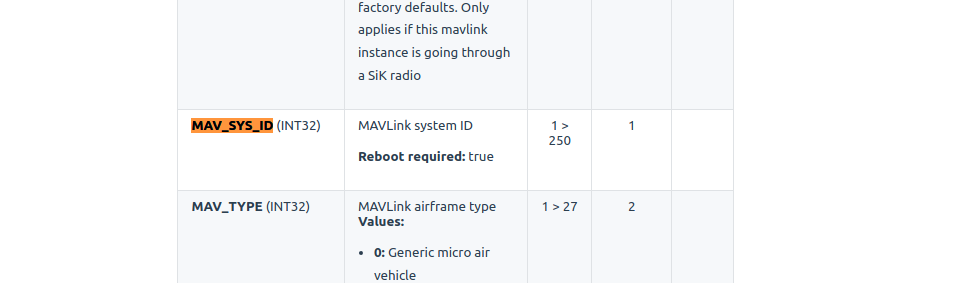
I believe you'll have to set the MAV_SYS_ID to a unique value for each drone. Make sure you have the latest QGC. I haven't used that feature in a while and I assume you should be able to choose which drone updates telemetry, but still be able to see both drones on the screen. Let me know if that works and if you had to update any other additional parameters, so others that come here can also do the same.
https://docs.px4.io/v1.12/en/advanced_config/parameter_reference.html -->
Thanks,
Rich -
Reading your post again . . .
It looks like you'll have to QGCs running, but using the same router. In the response above, I assumed a single GCS.
On each drone, go to /etc/modalai. There should be a file qgc-ip.conf or something similar. You can set the IP of the target laptop, so the MAVLink gets routed properly.
Let me know if that works.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login