System Image of using MAVROS onboard
-
Hi Modal AI team,
I am trying to use the mavros on board to sort out the time sync problems of mocap system. Now I am following the guidence from videos in documentations(https://docs.modalai.com/ros-installation-voxl2/, https://docs.modalai.com/mavros/).
But when I do the fastboot of the RB5 Platform 1.3.1-0.8 and load the parameters from here(https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/RB5_Flight/RB5_Flight_V1_param_ModalAIMotors_3s_rev_A.params?ref_type=heads, https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/ekf2_indoor_vio.params?ref_type=heads, https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/spektrum_dx6e_config.params?ref_type=heads), I find the drone did not work properly with doing the simple test mavros script.
Here is the output before the switch the mode from RC controller:
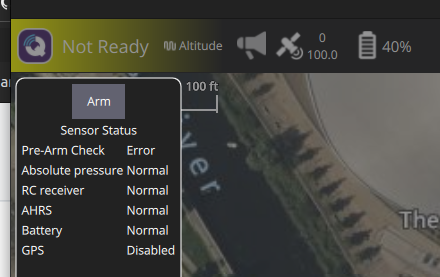
rb5:/home/mavros_test(simple-example)$ ./run_mavros_test.sh ... logging to /home/root/.ros/log/68e03f2e-4ba7-11f0-98f1-00037f1247d0/roslaunch-m0052-3747.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://192.168.1.121:43719/ SUMMARY ======== CLEAR PARAMETERS * /mavros/ PARAMETERS * /mavros/camera/frame_id: base_link * /mavros/cmd/use_comp_id_system_control: False * /mavros/conn/heartbeat_rate: 1.0 * /mavros/conn/system_time_rate: 1.0 * /mavros/conn/timeout: 10.0 * /mavros/conn/timesync_rate: 10.0 * /mavros/distance_sensor/hrlv_ez4_pub/field_of_view: 0.0 * /mavros/distance_sensor/hrlv_ez4_pub/frame_id: hrlv_ez4_sonar * /mavros/distance_sensor/hrlv_ez4_pub/id: 0 * /mavros/distance_sensor/hrlv_ez4_pub/orientation: PITCH_270 * /mavros/distance_sensor/hrlv_ez4_pub/send_tf: True * /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/x: 0.0 * /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/y: 0.0 * /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/z: -0.1 * /mavros/distance_sensor/laser_1_sub/id: 3 * /mavros/distance_sensor/laser_1_sub/orientation: PITCH_270 * /mavros/distance_sensor/laser_1_sub/subscriber: True * /mavros/distance_sensor/lidarlite_pub/field_of_view: 0.0 * /mavros/distance_sensor/lidarlite_pub/frame_id: lidarlite_laser * /mavros/distance_sensor/lidarlite_pub/id: 1 * /mavros/distance_sensor/lidarlite_pub/orientation: PITCH_270 * /mavros/distance_sensor/lidarlite_pub/send_tf: True * /mavros/distance_sensor/lidarlite_pub/sensor_position/x: 0.0 * /mavros/distance_sensor/lidarlite_pub/sensor_position/y: 0.0 * /mavros/distance_sensor/lidarlite_pub/sensor_position/z: -0.1 * /mavros/distance_sensor/sonar_1_sub/horizontal_fov_ratio: 1.0 * /mavros/distance_sensor/sonar_1_sub/id: 2 * /mavros/distance_sensor/sonar_1_sub/orientation: PITCH_270 * /mavros/distance_sensor/sonar_1_sub/subscriber: True * /mavros/distance_sensor/sonar_1_sub/vertical_fov_ratio: 1.0 * /mavros/fake_gps/eph: 2.0 * /mavros/fake_gps/epv: 2.0 * /mavros/fake_gps/fix_type: 3 * /mavros/fake_gps/geo_origin/alt: 408.0 * /mavros/fake_gps/geo_origin/lat: 47.3667 * /mavros/fake_gps/geo_origin/lon: 8.55 * /mavros/fake_gps/gps_rate: 5.0 * /mavros/fake_gps/mocap_transform: True * /mavros/fake_gps/satellites_visible: 5 * /mavros/fake_gps/tf/child_frame_id: fix * /mavros/fake_gps/tf/frame_id: map * /mavros/fake_gps/tf/listen: False * /mavros/fake_gps/tf/rate_limit: 10.0 * /mavros/fake_gps/tf/send: False * /mavros/fake_gps/use_mocap: True * /mavros/fake_gps/use_vision: False * /mavros/fcu_protocol: v2.0 * /mavros/fcu_url: udp://127.0.0.1:1... * /mavros/gcs_url: * /mavros/global_position/child_frame_id: base_link * /mavros/global_position/frame_id: map * /mavros/global_position/gps_uere: 1.0 * /mavros/global_position/rot_covariance: 99999.0 * /mavros/global_position/tf/child_frame_id: base_link * /mavros/global_position/tf/frame_id: map * /mavros/global_position/tf/global_frame_id: earth * /mavros/global_position/tf/send: False * /mavros/global_position/use_relative_alt: True * /mavros/image/frame_id: px4flow * /mavros/imu/angular_velocity_stdev: 0.0003490659 // 0... * /mavros/imu/frame_id: base_link * /mavros/imu/linear_acceleration_stdev: 0.0003 * /mavros/imu/magnetic_stdev: 0.0 * /mavros/imu/orientation_stdev: 1.0 * /mavros/landing_target/camera/fov_x: 2.0071286398 * /mavros/landing_target/camera/fov_y: 2.0071286398 * /mavros/landing_target/image/height: 480 * /mavros/landing_target/image/width: 640 * /mavros/landing_target/land_target_type: VISION_FIDUCIAL * /mavros/landing_target/listen_lt: False * /mavros/landing_target/mav_frame: LOCAL_NED * /mavros/landing_target/target_size/x: 0.3 * /mavros/landing_target/target_size/y: 0.3 * /mavros/landing_target/tf/child_frame_id: camera_center * /mavros/landing_target/tf/frame_id: landing_target * /mavros/landing_target/tf/listen: False * /mavros/landing_target/tf/rate_limit: 10.0 * /mavros/landing_target/tf/send: True * /mavros/local_position/frame_id: map * /mavros/local_position/tf/child_frame_id: base_link * /mavros/local_position/tf/frame_id: map * /mavros/local_position/tf/send: False * /mavros/local_position/tf/send_fcu: False * /mavros/mission/pull_after_gcs: True * /mavros/mission/use_mission_item_int: True * /mavros/mocap/use_pose: True * /mavros/mocap/use_tf: False * /mavros/mount/debounce_s: 4.0 * /mavros/mount/err_threshold_deg: 10.0 * /mavros/mount/negate_measured_pitch: False * /mavros/mount/negate_measured_roll: False * /mavros/mount/negate_measured_yaw: False * /mavros/odometry/fcu/odom_child_id_des: base_link * /mavros/odometry/fcu/odom_parent_id_des: map * /mavros/plugin_blacklist: ['safety_area', '... * /mavros/plugin_whitelist: [] * /mavros/px4flow/frame_id: px4flow * /mavros/px4flow/ranger_fov: 0.118682 * /mavros/px4flow/ranger_max_range: 5.0 * /mavros/px4flow/ranger_min_range: 0.3 * /mavros/safety_area/p1/x: 1.0 * /mavros/safety_area/p1/y: 1.0 * /mavros/safety_area/p1/z: 1.0 * /mavros/safety_area/p2/x: -1.0 * /mavros/safety_area/p2/y: -1.0 * /mavros/safety_area/p2/z: -1.0 * /mavros/setpoint_accel/send_force: False * /mavros/setpoint_attitude/reverse_thrust: False * /mavros/setpoint_attitude/tf/child_frame_id: target_attitude * /mavros/setpoint_attitude/tf/frame_id: map * /mavros/setpoint_attitude/tf/listen: False * /mavros/setpoint_attitude/tf/rate_limit: 50.0 * /mavros/setpoint_attitude/use_quaternion: False * /mavros/setpoint_position/mav_frame: LOCAL_NED * /mavros/setpoint_position/tf/child_frame_id: target_position * /mavros/setpoint_position/tf/frame_id: map * /mavros/setpoint_position/tf/listen: False * /mavros/setpoint_position/tf/rate_limit: 50.0 * /mavros/setpoint_raw/thrust_scaling: 1.0 * /mavros/setpoint_velocity/mav_frame: LOCAL_NED * /mavros/startup_px4_usb_quirk: False * /mavros/sys/disable_diag: False * /mavros/sys/min_voltage: 10.0 * /mavros/target_component_id: 1 * /mavros/target_system_id: 1 * /mavros/tdr_radio/low_rssi: 40 * /mavros/time/time_ref_source: fcu * /mavros/time/timesync_avg_alpha: 0.6 * /mavros/time/timesync_mode: MAVLINK * /mavros/vibration/frame_id: base_link * /mavros/vision_pose/tf/child_frame_id: vision_estimate * /mavros/vision_pose/tf/frame_id: odom * /mavros/vision_pose/tf/listen: False * /mavros/vision_pose/tf/rate_limit: 10.0 * /mavros/vision_speed/listen_twist: True * /mavros/vision_speed/twist_cov: True * /mavros/wheel_odometry/child_frame_id: base_link * /mavros/wheel_odometry/count: 2 * /mavros/wheel_odometry/frame_id: odom * /mavros/wheel_odometry/send_raw: True * /mavros/wheel_odometry/send_twist: False * /mavros/wheel_odometry/tf/child_frame_id: base_link * /mavros/wheel_odometry/tf/frame_id: odom * /mavros/wheel_odometry/tf/send: False * /mavros/wheel_odometry/use_rpm: False * /mavros/wheel_odometry/vel_error: 0.1 * /mavros/wheel_odometry/wheel0/radius: 0.05 * /mavros/wheel_odometry/wheel0/x: 0.0 * /mavros/wheel_odometry/wheel0/y: -0.15 * /mavros/wheel_odometry/wheel1/radius: 0.05 * /mavros/wheel_odometry/wheel1/x: 0.0 * /mavros/wheel_odometry/wheel1/y: 0.15 * /rosdistro: melodic * /rosversion: 1.14.13 NODES / mavros (mavros/mavros_node) mavros_test_node (mavros_test/mavros_test_node) auto-starting new master process[master]: started with pid [3761] ROS_MASTER_URI=http://127.0.0.1:11311/ setting /run_id to 68e03f2e-4ba7-11f0-98f1-00037f1247d0 process[rosout-1]: started with pid [3772] started core service [/rosout] process[mavros-2]: started with pid [3780] [ INFO] [1750184285.109890743]: simple_demo process[mavros_test_node-3]: started with pid [3781] [ INFO] [1750184285.209937032]: FCU URL: udp://127.0.0.1:14551@:14551 [ INFO] [1750184285.212315616]: udp0: Bind address: 127.0.0.1:14551 [ INFO] [1750184285.212435042]: GCS bridge disabled [ INFO] [1750184285.223761504]: Plugin 3dr_radio loaded [ INFO] [1750184285.224909364]: Plugin 3dr_radio initialized [ INFO] [1750184285.224988009]: Plugin actuator_control loaded [ INFO] [1750184285.227191854]: Plugin actuator_control initialized [ INFO] [1750184285.232061416]: Plugin adsb loaded [ INFO] [1750184285.234366354]: Plugin adsb initialized [ INFO] [1750184285.234482604]: Plugin altitude loaded [ INFO] [1750184285.235243746]: Plugin altitude initialized [ INFO] [1750184285.235522755]: Plugin cam_imu_sync loaded [ INFO] [1750184285.236044316]: Plugin cam_imu_sync initialized [ INFO] [1750184285.236145878]: Plugin camera loaded [ INFO] [1750184285.236777281]: Plugin camera initialized [ INFO] [1750184285.236882698]: Plugin cellular_status loaded [ INFO] [1750184285.238670554]: Plugin cellular_status initialized [ INFO] [1750184285.238792533]: Plugin command loaded [ INFO] [1750184285.243801730]: Plugin command initialized [ INFO] [1750184285.243909855]: Plugin companion_process_status loaded [ INFO] [1750184285.246147762]: Plugin companion_process_status initialized [ INFO] [1750184285.246364167]: Plugin debug_value loaded [ INFO] [1750184285.254379654]: Plugin debug_value initialized [ INFO] [1750184285.254463664]: Plugin distance_sensor blacklisted [ INFO] [1750184285.254651215]: Plugin esc_status loaded [ INFO] [1750184285.256089438]: Plugin esc_status initialized [ INFO] [1750184285.256269437]: Plugin esc_telemetry loaded [ INFO] [1750184285.256842508]: Plugin esc_telemetry initialized [ INFO] [1750184285.256979747]: Plugin fake_gps loaded [ INFO] [1750184285.270586199]: Plugin fake_gps initialized [ INFO] [1750184285.270774062]: Plugin ftp loaded [ INFO] [1750184285.276230706]: Plugin ftp initialized [ INFO] [1750184285.276364455]: Plugin geofence loaded [ INFO] [1750184285.280234490]: Plugin geofence initialized [ INFO] [1750184285.280353084]: Plugin global_position loaded [ INFO] [1750184285.293634381]: Plugin global_position initialized [ INFO] [1750184285.293813755]: Plugin gps_input loaded [ INFO] [1750184285.296167703]: Plugin gps_input initialized [ INFO] [1750184285.296305932]: Plugin gps_rtk loaded [ INFO] [1750184285.298824202]: Plugin gps_rtk initialized [ INFO] [1750184285.298963681]: Plugin gps_status loaded [ INFO] [1750184285.300931172]: Plugin gps_status initialized [ INFO] [1750184285.301065443]: Plugin guided_target loaded [ INFO] [1750184285.305234748]: Plugin guided_target initialized [ INFO] [1750184285.305392559]: Plugin hil loaded [ INFO] [1750184285.315346371]: Plugin hil initialized [ INFO] [1750184285.315475849]: Plugin home_position loaded [ INFO] [1750184285.318475889]: Plugin home_position initialized [ INFO] [1750184285.318592451]: Plugin imu loaded [ INFO] [1750184285.324887476]: Plugin imu initialized [ INFO] [1750184285.325036850]: Plugin landing_target loaded [ INFO] [1750184285.336912424]: Plugin landing_target initialized [ INFO] [1750184285.337114298]: Plugin local_position loaded [ INFO] [1750184285.342381202]: Plugin local_position initialized [ INFO] [1750184285.342516306]: Plugin log_transfer loaded [ INFO] [1750184285.345061347]: Plugin log_transfer initialized [ INFO] [1750184285.345179368]: Plugin mag_calibration_status loaded [ INFO] [1750184285.345968583]: Plugin mag_calibration_status initialized [ INFO] [1750184285.346087280]: Plugin manual_control loaded [ INFO] [1750184285.350035232]: Plugin manual_control initialized [ INFO] [1750184285.350165596]: Plugin mocap_pose_estimate loaded [ INFO] [1750184285.356091300]: Plugin mocap_pose_estimate initialized [ INFO] [1750184285.356221872]: Plugin mount_control loaded [ WARN] [1750184285.361474089]: Could not retrive negate_measured_roll parameter value, using default (0) [ WARN] [1750184285.361858671]: Could not retrive negate_measured_pitch parameter value, using default (0) [ WARN] [1750184285.362223148]: Could not retrive negate_measured_yaw parameter value, using default (0) [ WARN] [1750184285.363455747]: Could not retrive debounce_s parameter value, using default (4.000000) [ WARN] [1750184285.363785017]: Could not retrive err_threshold_deg parameter value, using default (10.000000) [ INFO] [1750184285.363842516]: Plugin mount_control initialized [ INFO] [1750184285.363987985]: Plugin nav_controller_output loaded [ INFO] [1750184285.365074282]: Plugin nav_controller_output initialized [ INFO] [1750184285.365188552]: Plugin obstacle_distance loaded [ INFO] [1750184285.367211512]: Plugin obstacle_distance initialized [ INFO] [1750184285.367317397]: Plugin odom loaded [ INFO] [1750184285.370957590]: Plugin odom initialized [ INFO] [1750184285.371125506]: Plugin onboard_computer_status loaded [ INFO] [1750184285.373269351]: Plugin onboard_computer_status initialized [ INFO] [1750184285.373424194]: Plugin param loaded [ INFO] [1750184285.375978402]: Plugin param initialized [ INFO] [1750184285.376109495]: Plugin play_tune loaded [ INFO] [1750184285.378353600]: Plugin play_tune initialized [ INFO] [1750184285.378488547]: Plugin px4flow loaded [ INFO] [1750184285.390864952]: Plugin px4flow initialized [ INFO] [1750184285.391056670]: Plugin rallypoint loaded [ INFO] [1750184285.393695982]: Plugin rallypoint initialized [ INFO] [1750184285.393765513]: Plugin rangefinder blacklisted [ INFO] [1750184285.393899210]: Plugin rc_io loaded [ INFO] [1750184285.397218727]: Plugin rc_io initialized [ INFO] [1750184285.397302216]: Plugin safety_area blacklisted [ INFO] [1750184285.397432737]: Plugin setpoint_accel loaded [ INFO] [1750184285.400211787]: Plugin setpoint_accel initialized [ INFO] [1750184285.400358610]: Plugin setpoint_attitude loaded [ INFO] [1750184285.408584095]: Plugin setpoint_attitude initialized [ INFO] [1750184285.408817531]: Plugin setpoint_position loaded [ INFO] [1750184285.423058772]: Plugin setpoint_position initialized [ INFO] [1750184285.423248980]: Plugin setpoint_raw loaded [ INFO] [1750184285.431053478]: Plugin setpoint_raw initialized [ INFO] [1750184285.431265456]: Plugin setpoint_trajectory loaded [ INFO] [1750184285.435559552]: Plugin setpoint_trajectory initialized [ INFO] [1750184285.435753093]: Plugin setpoint_velocity loaded [ INFO] [1750184285.440572447]: Plugin setpoint_velocity initialized [ INFO] [1750184285.440804998]: Plugin sys_status loaded [ INFO] [1750184285.449974021]: Plugin sys_status initialized [ INFO] [1750184285.450156000]: Plugin sys_time loaded [ INFO] [1750184285.454825511]: TM: Timesync mode: MAVLINK [ INFO] [1750184285.455232957]: TM: Not publishing sim time [ INFO] [1750184285.456293682]: Plugin sys_time initialized [ INFO] [1750184285.456435087]: Plugin terrain loaded [ INFO] [1750184285.457385812]: Plugin terrain initialized [ INFO] [1750184285.457527791]: Plugin trajectory loaded [ INFO] [1750184285.463945159]: Plugin trajectory initialized [ INFO] [1750184285.464101773]: Plugin tunnel loaded [ INFO] [1750184285.472213717]: Plugin tunnel initialized [ INFO] [1750184285.472432987]: Plugin vfr_hud loaded [ INFO] [1750184285.473091005]: Plugin vfr_hud initialized [ INFO] [1750184285.473157203]: Plugin vibration blacklisted [ INFO] [1750184285.473274911]: Plugin vision_pose_estimate loaded [ INFO] [1750184285.481329355]: Plugin vision_pose_estimate initialized [ INFO] [1750184285.481458573]: Plugin vision_speed_estimate loaded [ INFO] [1750184285.484838142]: Plugin vision_speed_estimate initialized [ INFO] [1750184285.485011162]: Plugin waypoint loaded [ INFO] [1750184285.489359008]: Plugin waypoint initialized [ INFO] [1750184285.489426456]: Plugin wheel_odometry blacklisted [ INFO] [1750184285.489566820]: Plugin wind_estimation loaded [ INFO] [1750184285.491681186]: Plugin wind_estimation initialized [ INFO] [1750184285.491887018]: Built-in SIMD instructions: ARM NEON [ INFO] [1750184285.491946601]: Built-in MAVLink package version: 2022.12.30 [ INFO] [1750184285.491985143]: Known MAVLink dialects: common ardupilotmega ASLUAV AVSSUAS all cubepilot development icarous matrixpilot paparazzi standard storm32 uAvionix ualberta [ INFO] [1750184285.492024413]: MAVROS started. MY ID 1.240, TARGET ID 1.1 [ INFO] [1750184285.492452589]: udp0: Remote address: 127.0.0.1:52402 [ INFO] [1750184285.493044253]: IMU: Attitude quaternion IMU detected! [ INFO] [1750184285.493460866]: RC_CHANNELS message detected! [ WARN] [1750184285.494036488]: GP: No GPS fix [ INFO] [1750184285.495672992]: IMU: High resolution IMU detected! [ INFO] [1750184285.583120636]: CON: Got HEARTBEAT, connected. FCU: PX4 Autopilot [ INFO] [1750184285.587369733]: IMU: High resolution IMU detected! [ INFO] [1750184285.588324260]: RC_CHANNELS message detected! [ WARN] [1750184285.588705092]: CMD: Unexpected command 200, result 4 [ INFO] [1750184285.631424543]: IMU: Attitude quaternion IMU detected! [ INFO] [1750184286.447042132]: FCU: Onboard controller regained [ INFO] [1750184286.594461915]: GF: Using MISSION_ITEM_INT [ INFO] [1750184286.594694049]: RP: Using MISSION_ITEM_INT [ INFO] [1750184286.594886080]: WP: Using MISSION_ITEM_INT [ INFO] [1750184286.595040871]: VER: 1.1: Capabilities 0x000000000000e4ef [ INFO] [1750184286.595179255]: VER: 1.1: Flight software: 01041040 (33795a0a30000000) [ INFO] [1750184286.595362119]: VER: 1.1: Middleware software: 01041040 (33795a0a30000000) [ INFO] [1750184286.595525400]: VER: 1.1: OS software: 04137dff (e7701b9e792e3101) [ INFO] [1750184286.595641285]: VER: 1.1: Board hardware: 00000001 [ INFO] [1750184286.595781180]: VER: 1.1: VID/PID: 0000:0000 [ INFO] [1750184286.595900242]: VER: 1.1: UID: 3044494530303030 [ INFO] [1750184290.124741638]: waiting for offboard modeAfter doing switch, the QGC shows that I changed to Altitude mode, and the drone can not arm.
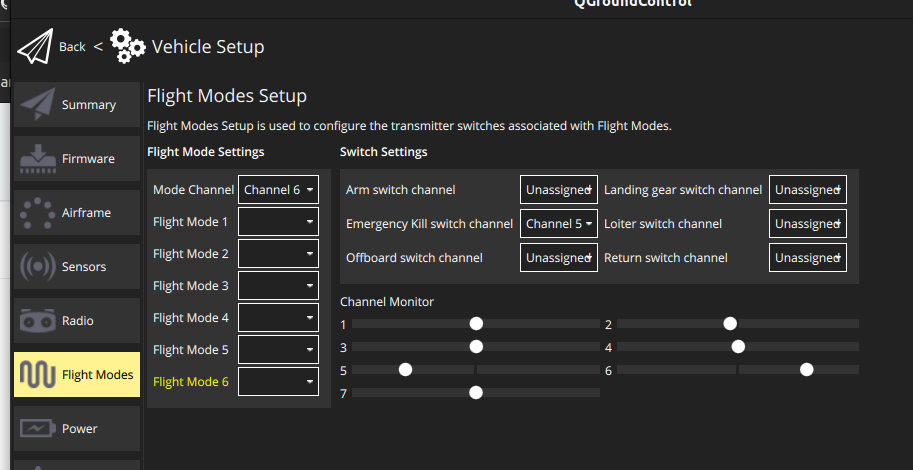
[ INFO] [1750184295.585805461]: HP: requesting home position [ WARN] [1750184295.598322751]: CMD: Unexpected command 200, result 4 [ INFO] [1750184300.585223300]: GF: mission received [ INFO] [1750184300.588035320]: RP: mission received [ INFO] [1750184300.588438703]: WP: mission received [ INFO] [1750184305.585716033]: HP: requesting home position [ WARN] [1750184306.094015932]: CMD: Unexpected command 200, result 4 [ INFO] [1750184315.585737496]: HP: requesting home position [ WARN] [1750184315.640176117]: GP: No GPS fix [ WARN] [1750184316.616906712]: CMD: Unexpected command 200, result 4 [ INFO] [1750184325.587073022]: HP: requesting home position [ WARN] [1750184327.127748956]: CMD: Unexpected command 200, result 4 [ WARN] [1750184332.700637205]: PositionTargetGlobal failed because no origin [ WARN] [1750184332.799973862]: PositionTargetGlobal failed because no origin [ INFO] [1750184335.585770281]: HP: requesting home position [ WARN] [1750184337.613212719]: CMD: Unexpected command 200, result 4 [ INFO] [1750184345.585775924]: HP: requesting home position [ WARN] [1750184345.642516774]: GP: No GPS fix [ WARN] [1750184348.114619803]: CMD: Unexpected command 200, result 4 [ INFO] [1750184355.585928133]: HP: requesting home position [ WARN] [1750184358.127486905]: CMD: Unexpected command 200, result 4 [ INFO] [1750184365.585804459]: HP: requesting home position [ WARN] [1750184368.614588172]: CMD: Unexpected command 200, result 4 [ INFO] [1750184375.585908496]: HP: requesting home position [ WARN] [1750184375.841301462]: GP: No GPS fix [ WARN] [1750184378.615369133]: CMD: Unexpected command 200, result 4 [ WARN] [1750184378.844832106]: PositionTargetGlobal failed because no origin [ WARN] [1750184378.945157352]: PositionTargetGlobal failed because no origin [ WARN] [1750184382.966882947]: PositionTargetGlobal failed because no origin [ WARN] [1750184383.067533244]: PositionTargetGlobal failed because no origin [ INFO] [1750184385.597828473]: HP: requesting home position [ WARN] [1750184389.110877295]: CMD: Unexpected command 200, result 4Another strange thing is the flight mode page in QGC, it did not show the available mode.
And the pre-flight check is always error:
I wonder whether this is the problem of the version of system image or the QGC parameters I used. It seems a bit difficult for me to test anything.
Btw, do you ever give it a try on using the mocap system with onboard MAVROS? If so, could you suggest me that should I run the mocap server also on board or on my host machine? And will there be any time sync problem still?
Best wishes,
Selina
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login