No autopilot found
-
I am trying to run the takeoff_and_land example (v 1.4.6)
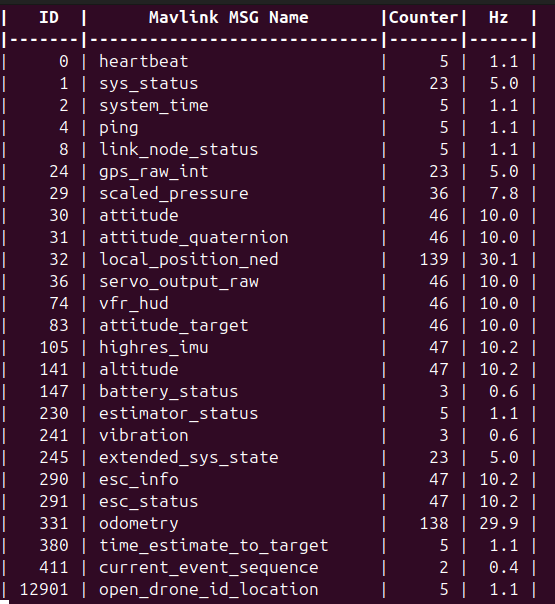
 I get an error saying no autopilot found. I checked and I have onboard heartbeat and I reset voxl-mavlink-server and voxl-vision-hub to factory settings and set:
I get an error saying no autopilot found. I checked and I have onboard heartbeat and I reset voxl-mavlink-server and voxl-vision-hub to factory settings and set:
"en_localhost_mavlink_udp": true,
"localhost_udp_port_number": 14551,I also checked and I have onboard heartbeat:
Has anyone encountered this before?
System: VOXL 2