VIO Features not updating / VIO not estimating correctly
-
Dear devs,
I would like to ask for your help on 2 issues that we are having with a custom UAV using Voxl 2 board.
- SDK 1.1.0 (system image 1.7.x)
- voxl-suite: 1.3.4
- voxl-qvio-server: 1.0.4
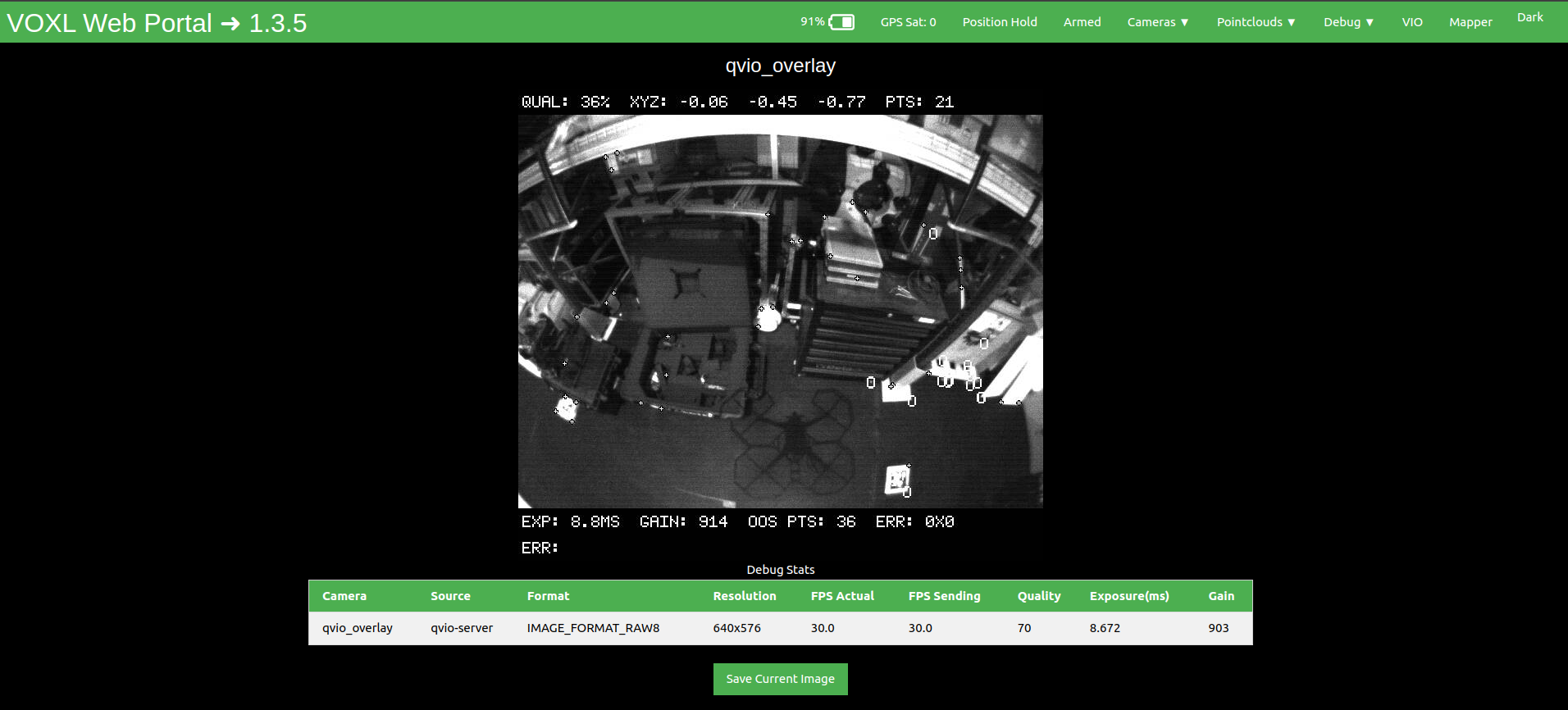
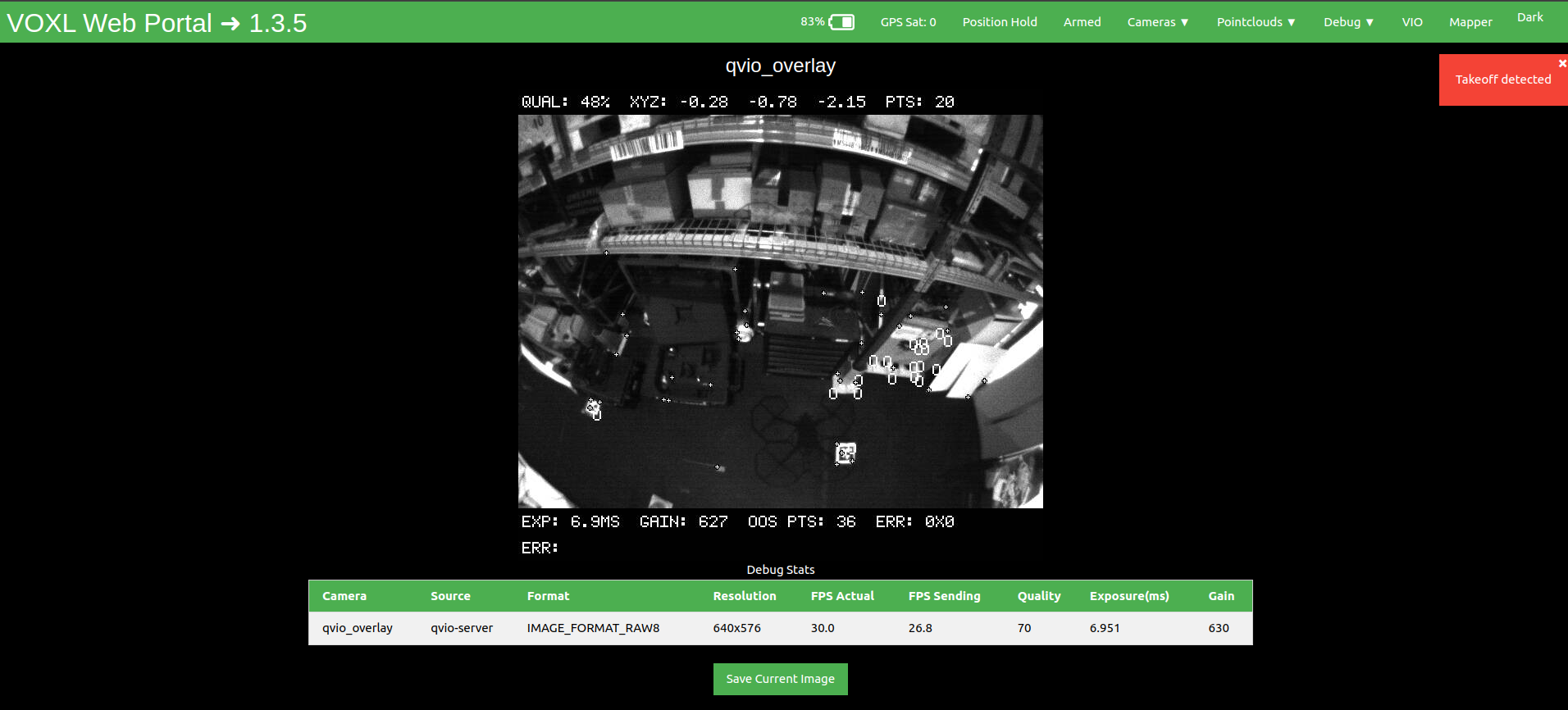
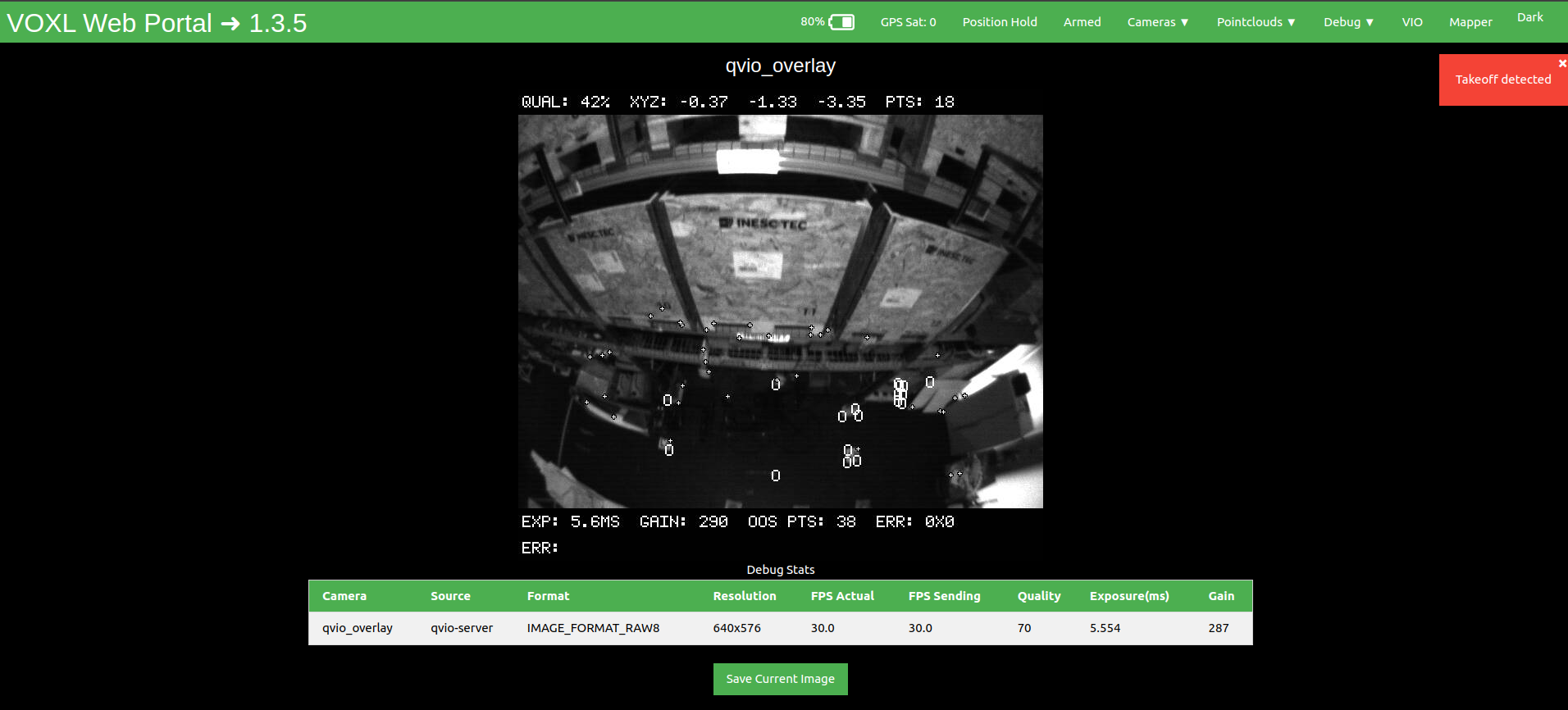
- The VIO is not updating nor increasing the number of keypoints if the initial features are still visible despite being on the right corner of the image --> PTS always <30.
See images below:
- 1.6 m above takeoff and 1 meter to the left
- 2.1 m above takeoff and 1 meter to the left
- 3.2 m above takeoff and 1.2 m to the left
We have tried to disable mapping, since it could be saving old features for SLAM. Also tried to increase the acceptance of pixel deviation in the config file. We have even tried to change the qvio service and deploy it, but fastly concluded that it is just a layer for quality computation and has no intervention on the algorithm.
Is this "issue" limited by the MVISLAM? Is there a reason not to update for closer features?
- Another conserve is that VIO seems to work perfectly when moving the UAV by hand, but when flying, it has a random behavior. Sometimes, it starts to estimate correctly, but if the estimation is wrong at takeoff, the position sent to px4 makes the UAV wobble around the sent position (either in POSITION or OFFBOARD modes) and can´t stabilize. Could this be the cause of wrong filter estimation due to high uncertainty in position measurements?
Thank you for your help in advance.
Best Regards,
Jacob
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login