Collision Prevention doesn't work
-
Hi, our team followed the VOA instructions to try the important features needed in our projects and it appears "Collision Prevention" doesn't work like the video demonstrated and we still can get our Sentinel very close (around 2 inches) to walls or trees. The only thing possibly wrong is we don't get OBSTACLE_DISTANCE message in QGC. Otherwise, we can see all
stereo_front_pc,stereo_rear_pcandvoa_pc_outpoint clouds in voxl-portal with voxl-dfs-server running, Health Check and voxl system check in voxl-portal all passed and object detection enabled for different Minimum Distances.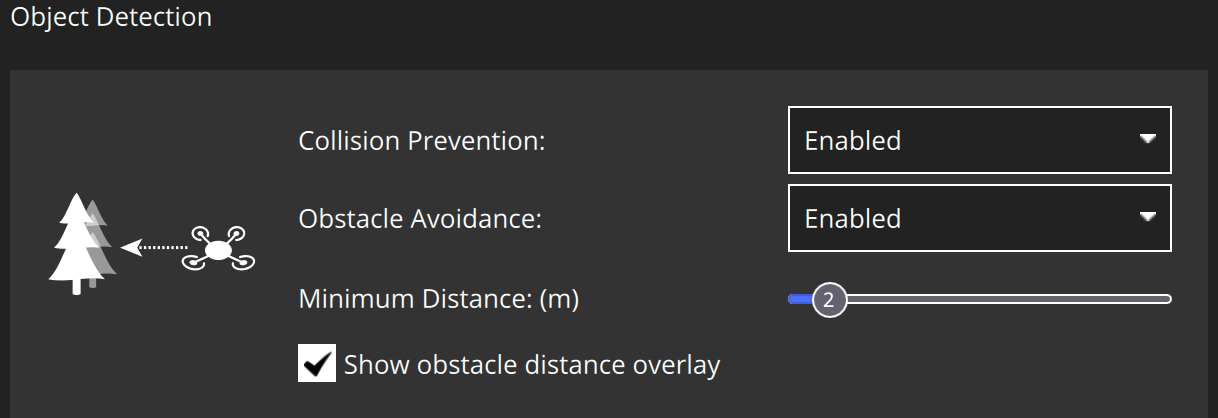 and CP_* parameters verified
and CP_* parameters verified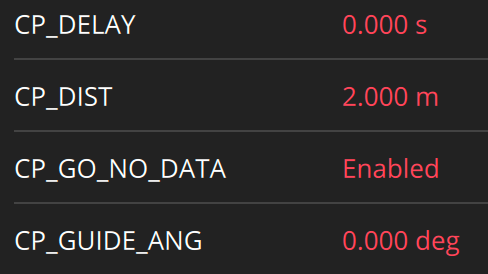 :
:Any clue how to debug?