voxl-mapper setting
-
Good morning,
I'm trying to use voxl-mapper with a starling 2. When I use it with waypoints in larger rooms it works correctly, while if I use it in hallways or to go through doorways the drone doesn't follow the correct path and slams into walls.
In some situations the drone goes to the opposite side from the placed waypoint.This is the result of "cat etc/modalai/extrinsics.conf"
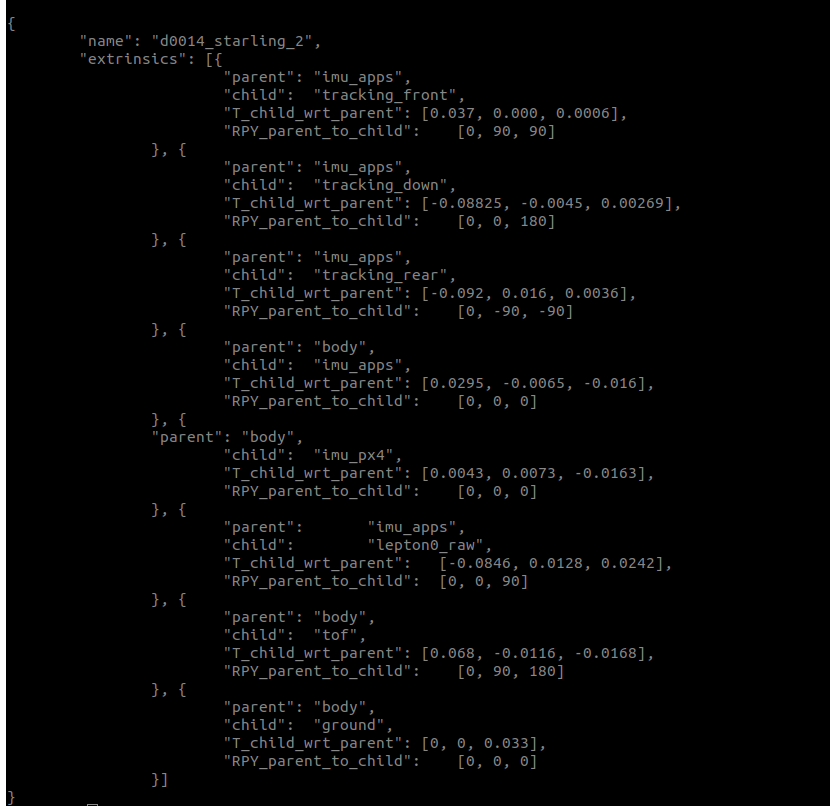
This is the result of "voxl-inspect-extrinsics"
#0:
parent: imu_apps
child: tracking_front
T_child_wrt_parent: 0.037 0.000 0.001
RPY_parent_to_child: 0.0 90.0 90.0
R_child_to_parent: 0.000 -0.000 1.000
1.000 0.000 -0.000
-0.000 1.000 0.000
#1:
parent: imu_apps
child: tracking_down
T_child_wrt_parent: -0.088 -0.004 0.003
RPY_parent_to_child: 0.0 0.0 180.0
R_child_to_parent: -1.000 -0.000 0.000
0.000 -1.000 -0.000
0.000 0.000 1.000
#2:
parent: imu_apps
child: tracking_rear
T_child_wrt_parent: -0.092 0.016 0.004
RPY_parent_to_child: 0.0 -90.0 -90.0
R_child_to_parent: 0.000 0.000 -1.000
-1.000 0.000 -0.000
0.000 1.000 0.000
#3:
parent: body
child: imu_apps
T_child_wrt_parent: 0.029 -0.006 -0.016
RPY_parent_to_child: 0.0 0.0 0.0
R_child_to_parent: 1.000 -0.000 0.000
0.000 1.000 -0.000
0.000 0.000 1.000
#4:
parent: body
child: imu_px4
T_child_wrt_parent: 0.004 0.007 -0.016
RPY_parent_to_child: 0.0 0.0 0.0
R_child_to_parent: 1.000 -0.000 0.000
0.000 1.000 -0.000
0.000 0.000 1.000
#5:
parent: imu_apps
child: lepton0_raw
T_child_wrt_parent: -0.085 0.013 0.024
RPY_parent_to_child: 0.0 0.0 90.0
R_child_to_parent: 0.000 -1.000 0.000
1.000 0.000 -0.000
0.000 0.000 1.000
#6:
parent: body
child: tof
T_child_wrt_parent: 0.068 -0.012 -0.017
RPY_parent_to_child: 0.0 90.0 180.0
R_child_to_parent: -0.000 -0.000 1.000
0.000 -1.000 -0.000
1.000 0.000 0.000
#7:
parent: body
child: ground
T_child_wrt_parent: 0.000 0.000 0.033
RPY_parent_to_child: 0.0 0.0 0.0
R_child_to_parent: 1.000 -0.000 0.000
0.000 1.000 -0.000
0.000 0.000 1.000This is the result of "cat /etc/modalai/voxl-mapper.conf"
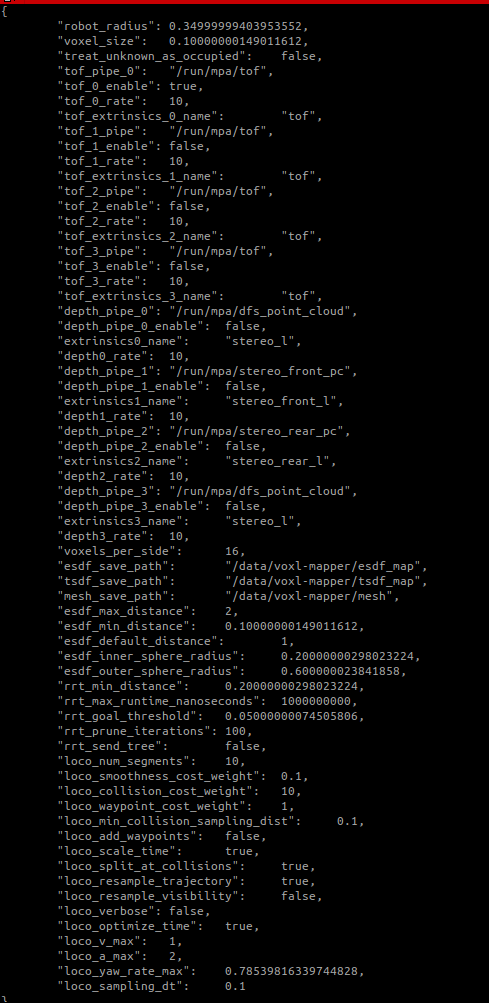
While this is the result of "ls /run/mpa/"
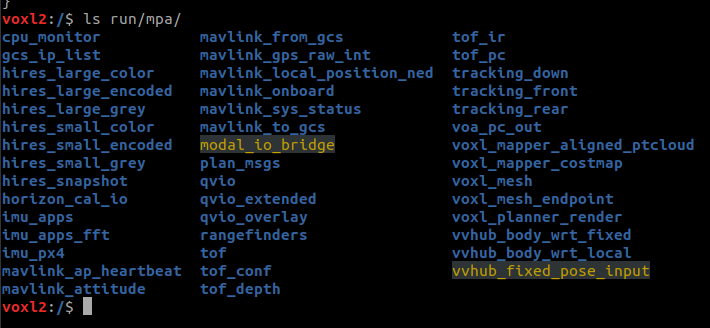
Maybe there is an error in the sensors used in the mapper configuration? Maybe I need to enter the tracking cams?
Could you help me solve the problem?Thank you!