voxl_planner: send vx,vy,yaw_rate command
-
Hi!
I currently use voxl_planner to send position+yaw commands 1Hz:
void LocalOneStep::send_setpoint_position_to_position(Point3f &goal_pos, float goal_yaw) { setpoint_position_t msg; msg.magic_number = SETPOINT_POSITION_MAGIC_NUMBER; msg.coordinate_frame = MAV_FRAME_LOCAL_NED; msg.type_mask = POSITION_TARGET_TYPEMASK_VX_IGNORE | POSITION_TARGET_TYPEMASK_VY_IGNORE | POSITION_TARGET_TYPEMASK_VZ_IGNORE | POSITION_TARGET_TYPEMASK_AX_IGNORE | POSITION_TARGET_TYPEMASK_AY_IGNORE | POSITION_TARGET_TYPEMASK_AZ_IGNORE | POSITION_TARGET_TYPEMASK_YAW_RATE_IGNORE; msg.position[0] = cos_north_wrt_fixed*goal_pos[0] - sin_north_wrt_fixed*goal_pos[1]; msg.position[1] = sin_north_wrt_fixed*goal_pos[0] + cos_north_wrt_fixed*goal_pos[1]; msg.position[2] = goal_z_m; //goal_pos[2]; msg.yaw = goal_yaw + north_wrt_fixed_rad; // to be ignored: msg.velocity[0] = 0.0;// [m/s] msg.velocity[1] = 0.0;// [m/s] msg.velocity[2] = 0.0; // [m/s] msg.yaw_rate = 0.0; // [rad/sec] pipe_server_write(plan_ch_, &msg, sizeof(setpoint_position_t)); }Similarly, I would like to send commands vx,vy,z,yaw_rate :
void LocalOneStep::send_setpoint_position_velocity_and_yaw_rate(Point3f &cur_pos, float curr_yaw, Point3f &des_velocity, float des_yaw_rate) { setpoint_position_t msg; msg.magic_number = SETPOINT_POSITION_MAGIC_NUMBER; msg.coordinate_frame = MAV_FRAME_LOCAL_NED; // !! any other frame like MAV_FRAME_LOCAL_FRD is // currently not supported by voxl-vision-hub msg.type_mask = POSITION_TARGET_TYPEMASK_X_IGNORE | POSITION_TARGET_TYPEMASK_Y_IGNORE | POSITION_TARGET_TYPEMASK_VZ_IGNORE | POSITION_TARGET_TYPEMASK_AX_IGNORE | POSITION_TARGET_TYPEMASK_AY_IGNORE | POSITION_TARGET_TYPEMASK_AZ_IGNORE | POSITION_TARGET_TYPEMASK_YAW_IGNORE; msg.velocity[0] = cos_north_wrt_fixed*des_velocity[0] - sin_north_wrt_fixed*des_velocity[1];// [m/s] msg.velocity[1] = sin_north_wrt_fixed*des_velocity[0] + cos_north_wrt_fixed*des_velocity[1];// [m/s] msg.velocity[2] = 0.0; // [m/s] # to be ignored msg.yaw_rate = des_yaw_rate; // [rad/sec] // for stop in-place - see voxl-vision-hub offboard_trajetcory.c: _update_last_position msg.position[0] = cos_north_wrt_fixed*cur_pos[0] - sin_north_wrt_fixed*cur_pos[1]; msg.position[1] = sin_north_wrt_fixed*cur_pos[0] + cos_north_wrt_fixed*cur_pos[1]; msg.position[2] = goal_z_m; //cur_pos[2]; # to be included in cmd msg.yaw = curr_yaw + north_wrt_fixed_rad; pipe_server_write(plan_ch_, &msg, sizeof(setpoint_position_t)); }But It seems like my intentions are lost during the processing of voxl-vision-hub.
I use pymavlink to listen to the mavlink messages:
connection = mavutil.mavlink_connection('udpin:127.0.0.1:14551')
Below are my recordings of POSITION_TARGET_LOCAL_NED mavlink msg (@10Hz)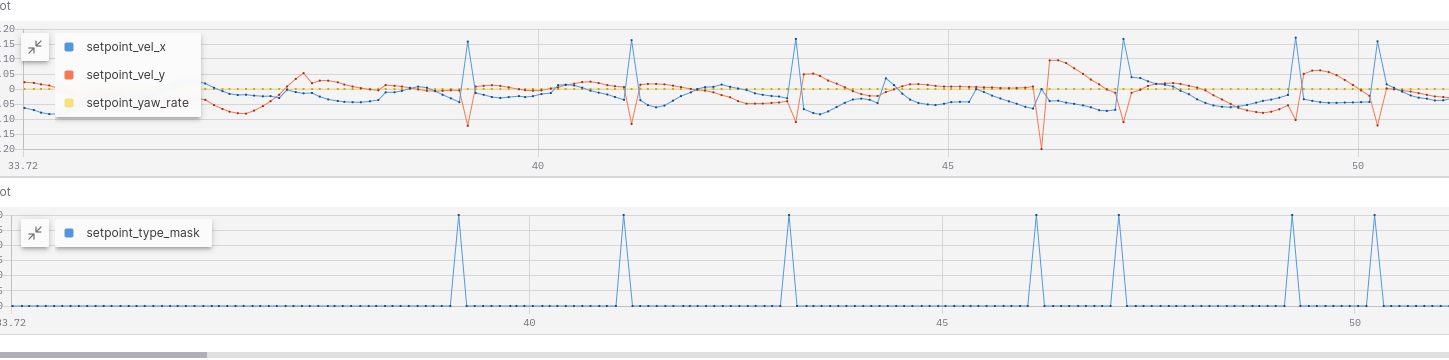
I would expect the setpoint values to remain constant until a new value is sent from voxl-planner (like it is with the x,y,z,yaw setpoint command)
Any thoughts?Thank you
-
Hi!
I currently use voxl_planner to send position+yaw commands 1Hz:
void LocalOneStep::send_setpoint_position_to_position(Point3f &goal_pos, float goal_yaw) { setpoint_position_t msg; msg.magic_number = SETPOINT_POSITION_MAGIC_NUMBER; msg.coordinate_frame = MAV_FRAME_LOCAL_NED; msg.type_mask = POSITION_TARGET_TYPEMASK_VX_IGNORE | POSITION_TARGET_TYPEMASK_VY_IGNORE | POSITION_TARGET_TYPEMASK_VZ_IGNORE | POSITION_TARGET_TYPEMASK_AX_IGNORE | POSITION_TARGET_TYPEMASK_AY_IGNORE | POSITION_TARGET_TYPEMASK_AZ_IGNORE | POSITION_TARGET_TYPEMASK_YAW_RATE_IGNORE; msg.position[0] = cos_north_wrt_fixed*goal_pos[0] - sin_north_wrt_fixed*goal_pos[1]; msg.position[1] = sin_north_wrt_fixed*goal_pos[0] + cos_north_wrt_fixed*goal_pos[1]; msg.position[2] = goal_z_m; //goal_pos[2]; msg.yaw = goal_yaw + north_wrt_fixed_rad; // to be ignored: msg.velocity[0] = 0.0;// [m/s] msg.velocity[1] = 0.0;// [m/s] msg.velocity[2] = 0.0; // [m/s] msg.yaw_rate = 0.0; // [rad/sec] pipe_server_write(plan_ch_, &msg, sizeof(setpoint_position_t)); }Similarly, I would like to send commands vx,vy,z,yaw_rate :
void LocalOneStep::send_setpoint_position_velocity_and_yaw_rate(Point3f &cur_pos, float curr_yaw, Point3f &des_velocity, float des_yaw_rate) { setpoint_position_t msg; msg.magic_number = SETPOINT_POSITION_MAGIC_NUMBER; msg.coordinate_frame = MAV_FRAME_LOCAL_NED; // !! any other frame like MAV_FRAME_LOCAL_FRD is // currently not supported by voxl-vision-hub msg.type_mask = POSITION_TARGET_TYPEMASK_X_IGNORE | POSITION_TARGET_TYPEMASK_Y_IGNORE | POSITION_TARGET_TYPEMASK_VZ_IGNORE | POSITION_TARGET_TYPEMASK_AX_IGNORE | POSITION_TARGET_TYPEMASK_AY_IGNORE | POSITION_TARGET_TYPEMASK_AZ_IGNORE | POSITION_TARGET_TYPEMASK_YAW_IGNORE; msg.velocity[0] = cos_north_wrt_fixed*des_velocity[0] - sin_north_wrt_fixed*des_velocity[1];// [m/s] msg.velocity[1] = sin_north_wrt_fixed*des_velocity[0] + cos_north_wrt_fixed*des_velocity[1];// [m/s] msg.velocity[2] = 0.0; // [m/s] # to be ignored msg.yaw_rate = des_yaw_rate; // [rad/sec] // for stop in-place - see voxl-vision-hub offboard_trajetcory.c: _update_last_position msg.position[0] = cos_north_wrt_fixed*cur_pos[0] - sin_north_wrt_fixed*cur_pos[1]; msg.position[1] = sin_north_wrt_fixed*cur_pos[0] + cos_north_wrt_fixed*cur_pos[1]; msg.position[2] = goal_z_m; //cur_pos[2]; # to be included in cmd msg.yaw = curr_yaw + north_wrt_fixed_rad; pipe_server_write(plan_ch_, &msg, sizeof(setpoint_position_t)); }But It seems like my intentions are lost during the processing of voxl-vision-hub.
I use pymavlink to listen to the mavlink messages:
connection = mavutil.mavlink_connection('udpin:127.0.0.1:14551')
Below are my recordings of POSITION_TARGET_LOCAL_NED mavlink msg (@10Hz)I would expect the setpoint values to remain constant until a new value is sent from voxl-planner (like it is with the x,y,z,yaw setpoint command)
Any thoughts?Thank you
Hi again,
From investigating the voxl-vision-hub code with added prints for debug, I see that the setpoint SETPOINT_POSITION_MAGIC_NUMBER is sent to mavlink-server from two functions -
(1) _send_current_position()
sending the current position, and type-mask ignoring vx,vy,vz,ax,ay,az,yaw_rate// fetch latest position and attitude from px4 itself so the setpoint // we are about to send is a close as possible to where we currently are(2) execute_setpoint_position_command()
sending the setpoint as recieved from voxl-plannerThe implemented behaviour of (1) suits the situation of position+yaw command. However for vx+vy+z+yaw_rate command I think something is missing.
Any help will be appreciated.
Thank you, Meytal
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login