@Moderator Hi, do you know where can I get a description of the tsdf file format that the voxl-mapper uses?
I
Latest posts made by iparra
-
RE: How to load a vxblx file into voxl-mapperposted in Ask your questions right here!
-
How to load a vxblx file into voxl-mapperposted in Ask your questions right here!
Hi,
we are trying to load map a .vxblx tsdf map generated with voxblox into the drone. We have assumed that the vxblx is the tsdf file that the voxl-mapper generates and have transformed the vxblx file to esdf with the test tool tsdf_to_esdf from voxblox project. Unfortunately it seems that the .vxblx is not accepted by voxl-mapper. Apparently they are not the same format. Is there a way to load a voxblox .vxblx tsdf map into voxl-mapper? Are we missing something?Another workaround would be to reproduce a bag directly into voxl-mapper and let it create the map files. We have found voxl-mpa-to-ros, is there an equivalent voxl-ros-to-mpa?
Thank you in advance
-
RE: Starling planning using waypointsposted in Ask your questions right here!
@iparra said in Starling planning using waypoints:
@Moderator Thak you for your help.
I already have a first working version as far as planning is concerned, but I'm looking now into voxl-portal to be able to nicely interactuate with the buttons and the voxl-mapper "states".
Another question, after an initial mapping, I don't want to use the mapping feature of voxl-mapper but the planning. Is there a way to tell voxl-mapper not to update the map with the new measures. As there is not actual SLAM, when some VIO fails the map gets ruined and cannot continue flying unless I clear the map and reload. We are relocalizing using april tags, but after the relocalizacions the map can be ruined.
Thank you in advance
-
RE: Starling planning using waypointsposted in Ask your questions right here!
@Moderator Thak you for your help.
I already have a first working version as far as planning is concerned, but I'm looking now into voxl-portal to be able to nicely interactuate with the buttons and the voxl-mapper "states".
-
Starling planning using waypointsposted in Ask your questions right here!
Hi,
we want to fly the drone in large indoors environments and we want the planner not to use a single target point but a series of waypoints so that we can plan a very long trajectory inside a building. It does not necessarily has to be on the voxl-portal by clicking, it is ok if we pass along a series of way points coordinates (10-15) and the planner performs plans between waypoints or a long plan passing through the way points. Where should we start looking to do so?
Thank you in advance
-
RE: Sentinel ESC blue leds don't remain solid or flashposted in Starling
@Eric-Katzfey We loaded the default parameters with QGC and everything is back to normal.
Thank you for your help!
-
RE: Sentinel ESC blue leds don't remain solid or flashposted in Starling
@Alex-Kushleyev Thank you Alex, we have a Starling with Voxl 2 so I assume we need Starling_V2.params
We also read that there's a backup of the params on /etc/modalai/voxl-px4-set-default-parameters.config. We have checked and that file exists. We will try to restore the params and get back to you.
-
RE: Sentinel ESC blue leds don't remain solid or flashposted in Starling
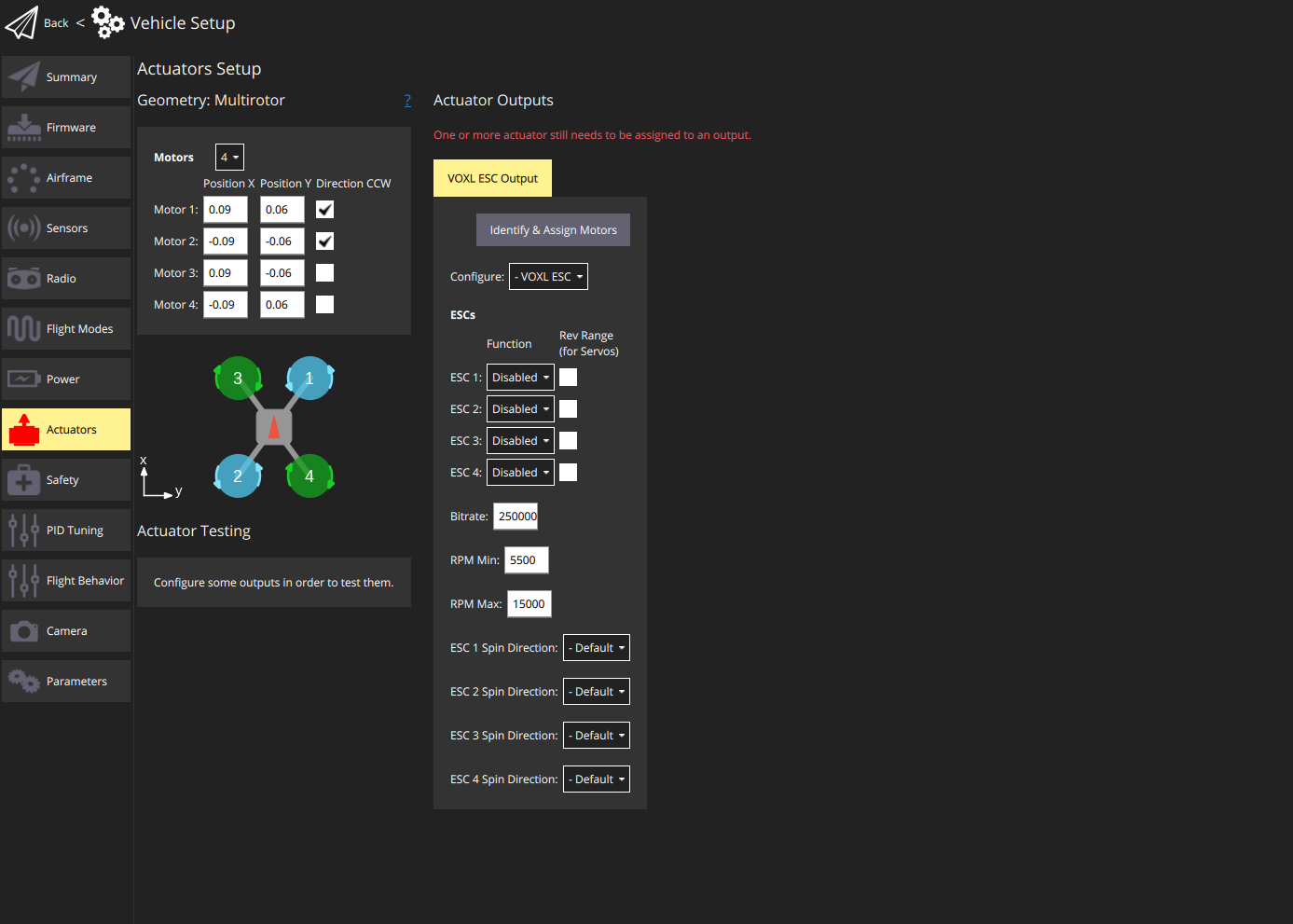
@Alex-Kushleyev Using QGC seems that we have lost some configuration of the rotors. It says "One or more actuator still needs to be assigned an output"
I attached a screen capture
-
RE: Sentinel ESC blue leds don't remain solid or flashposted in Starling
@Alex-Kushleyev I upgraded with apt and repeated the tests
voxl2:/usr/share/modalai/voxl-esc-tools$ ./voxl-esc-scan.py
Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00)
[GCC 8.4.0]
dpkg-query: no packages found matching voxl-esc-board-detect.py
dpkg-query: no packages found matching voxl-esc-calibrate.py
dpkg-query: no packages found matching voxl-esc-led.py
dpkg-query: no packages found matching voxl-esc-neopixel-test.py
dpkg-query: no packages found matching voxl-esc-scan.py
dpkg-query: no packages found matching voxl-esc-spin-helper.sh
dpkg-query: no packages found matching voxl-esc-spin-sine.py
dpkg-query: no packages found matching voxl-esc-spin-step.py
dpkg-query: no packages found matching voxl-esc-spin.py
dpkg-query: no packages found matching voxl-esc-tools-bin
dpkg-query: no packages found matching voxl-esc-upload-firmware-all.sh
dpkg-query: no packages found matching voxl-esc-upload-firmware.py
dpkg-query: no packages found matching voxl-esc-upload-params.py
dpkg-query: no packages found matching voxl-esc-verify-params.py
dpkg-query: no packages found matching voxl_esc_setup_paths.py
dpkg-query: no packages found matching voxl_serial.py
Found voxl-esc tools bin version: 1.6
VOXL Platform: M0054
Detected RB5 Flight, VOXL2 M0054 or M0104!
INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000
Sending library name request: libslpi_qrb5165_io.so
Received standard error event 2
Sending initialization request
INFO: ESC(s) detected on port: /dev/slpi-uart-2, baud rate: 2000000, protocol: firmwareINFO: ESC Information:
INFO: ---------------------
ID : 0
Board : version 37: ModalAi 4-in-1 ESC (M0134-1)
UID : 0x203330385246571800240035
Firmware : version 39, hash 3d7ee4eb
Bootloader : version 183, hash b4fa2cf8ID : 1 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x20333038524657180025004D Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash b4fa2cf8 ID : 2 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x203330385246571800230029 Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash b4fa2cf8 ID : 3 Board : version 37: ModalAi 4-in-1 ESC (M0134-1) UID : 0x203330385246571800240021 Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash b4fa2cf8
voxl2:/usr/share/modalai/voxl-esc-tools$ voxl-px4 -d
[INFO] Reading from /etc/modalai/voxl-px4.conf
Found DSP signature file
[INFO] Disabling daemon mode
GPS=MRO_M10136A
RC=CRSF_RAW
ESC=VOXL_ESC
POWER MANAGER=VOXLPM
DISTANCE SENSOR=NONE
OSD=DISABLE
DAEMON_MODE=DISABLE
SENSOR_CAL=ACTUAL
EXTRA STEPS:
INFO [px4] mlockall() enabled. PX4's virtual address space is locked into RAM.
INFO [px4] assuming working directory is rootfs, no symlinks needed.
INFO [muorb] Got muorb init command
Sending initialization request
INFO [muorb] muorb protobuf initalize method succeeded
INFO [muorb] succesfully did ADVERTISE_TEST_TYPE
ERROR [muorb] Test timed out waiting for response
INFO [parameters] Starting param sync THREAD
| ___ \ \ \ / / / |
| |/ / \ V / / /| |
| __/ / \ / /| |
| | / /^\ \ ___ |
_| / / |_/px4 starting.
INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-start 0
GPS: MRO_M10136A
RC: CRSF_RAW
ESC: VOXL_ESC
POWER MANAGER: VOXLPM
DISTANCE SENSOR: NONE
OSD: DISABLE
EXTRA STEPS:
Running on M0054
INFO [param] selected parameter default file /data/px4/param/parameters
ERROR [parameters] Timeout waiting for parameter_client_reset_response
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_CAPACITY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_N_CELLS
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_R_INTERNAL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_V_CHARGED
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT1_V_EMPTY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for BAT_CRIT_THR
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_ID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_PRIO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_XOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_YOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_ACC0_ZOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_ID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_PRIO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_XOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_YOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_GYRO0_ZOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_PRIO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ROT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_XODIAG
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_XOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_XSCALE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_YODIAG
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_YOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_YSCALE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ZODIAG
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ZOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CAL_MAG0_ZSCALE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR0_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR0_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR1_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR1_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR2_KM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR2_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR2_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR3_KM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR3_PX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR3_PY
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CA_ROTOR_COUNT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for CBRK_SUPPLY_CHK
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_ARM_SDCARD
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_CPU_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_DISARM_LAND
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_DISARM_PRFLT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLIGHT_UUID
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLTMODE1
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLTMODE4
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_FLTMODE6
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_OF_LOSS_T
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for COM_SPOOLUP_TIME
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_ABL_LIM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_EV_QMIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_GPS_CTRL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_HGT_REF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_IMU_POS_X
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_IMU_POS_Y
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_IMU_POS_Z
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_MAG_TYPE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for EKF2_RNG_CTRL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for GPS_UBX_DYNMODEL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_ACCEL_CUTOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_DGYRO_CUTOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_GYRO_CUTOFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_GYRO_DNF_EN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for IMU_GYRO_RATEMAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for LNDMC_ROT_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for LNDMC_TRIG_TIME
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for LND_FLIGHT_T_LO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MAV_TYPE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_D
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_I
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCHRATE_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_PITCH_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_D
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_I
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLLRATE_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_ROLL_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_YAWRATE_I
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_YAWRATE_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MC_YAWRATE_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_ACC_HOR_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_ACC_UP_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_JERK_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_LAND_SPEED
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_THR_HOVER
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_THR_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_THR_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_TILTMAX_AIR
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_TKO_RAMP_T
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_VEL_MANUAL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_CRUISE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_MAN_EXPO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_D_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_I_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_XY_VEL_P_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_YAW_EXPO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_MAN_EXPO
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_P
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_VEL_MAX_DN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_VEL_MAX_UP
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_VEL_P_ACC
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_V_AUTO_DN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for MPC_Z_V_AUTO_UP
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for NAV_ACC_RAD
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC12_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC12_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC12_TRIM
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC5_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC5_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC6_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC6_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC7_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC7_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC8_MAX
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC8_MIN
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_CHAN_CNT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_FLTMODE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_KILL_SW
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_PITCH
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_ROLL
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_THROTTLE
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RC_MAP_YAW
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RTL_DESCEND_ALT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for RTL_RETURN_ALT
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for SENS_BOARD_X_OFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for SENS_BOARD_Y_OFF
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for SYS_AUTOSTART
ERROR [parameters] Timeout waiting for parameter_client_set_value_response for THR_MDL_FAC
INFO [parameters] BSON document size 2888 bytes, decoded 2888 bytes (INT32:33, FLOAT:99)
INFO [logger] logger started (mode=all)
Starting IMU driver with no rotation
INFO [qshell] Send cmd: 'icm42688p start -s'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'icp101xx start -I -b 5'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Looking for qmc5883l magnetometer
INFO [qshell] Send cmd: 'qmc5883l start -R 10 -X -b 1'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Looking for ist8310 magnetometer
INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'gps start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Looking for ncp5623c RGB LED
INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Starting VOXL ESC driver
INFO [qshell] Send cmd: 'voxl_esc start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
Starting CRSF RC driver
INFO [qshell] Send cmd: 'crsf_rc start -d 7'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'voxlpm start -X -b 2'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'sensors start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'ekf2 start'
ERROR [qshell] command timed out
ERROR [qshell] Command failed
INFO [qshell] Send cmd: 'mc_pos_control start' -
RE: Sentinel ESC blue leds don't remain solid or flashposted in Starling
Output of the initialization status
voxl2:/usr/share/modalai/voxl-esc-tools$ voxl-px4 -d | grep VOXL_ESC
ESC=VOXL_ESC
ESC: VOXL_ESCVersions of all the packages (I'm not sure about the SDK version)
voxl2:/usr/share/modalai/voxl-esc-tools$ dpkg -l | grep voxl
ii libvoxl-cci-direct 0.2.1 arm64 Library for CCI direct interface
ii libvoxl-cutils 0.1.1 arm64 ModalAI's c utils
ii mv-voxl 0.1-r0 arm64 mv version 0.1-r0
ii royale-331-spectre-4-7 1.1.1 arm64 Royale/Spectre build for voxl platforms
ii rtl8812au 5.6.4.2-git-r0 arm64 RTL8812au kernel driver (wifi) and supplemental files for enabling wifi on voxl2
ii voxl-bind-spektrum 0.1.0 arm64 Utility to trigger Spektrum Bind
ii voxl-camera-calibration 0.5.3 arm64 On-board camera calibration for VOXL
ii voxl-camera-server 1.8.9 arm64 publishes camera frames over named pipe interface
ii voxl-ceres-solver 2:1.14.0-10 arm64 ceres-solver for voxl
ii voxl-configurator 0.4.8 arm64 tools to configure and test MPA
ii voxl-cpu-monitor 0.4.7 arm64 publishes CPU Data over MPA pipe and provides fan tools
ii voxl-docker-support 1.3.0 arm64 tools to improve the usability of docker on VOXL
ii voxl-elrs 0.1.3 arm64 Tool to flash TX/RX with ELRS FW
ii voxl-esc 1.3.7 arm64 Tools for ModalAI's VOXL ESC
ii voxl-feature-tracker 0.3.2 arm64 track features on voxl
ii voxl-flow-server 0.3.3 arm64 optical flow from feature tracker
ii voxl-gphoto2-server 0.0.10 arm64 Gstreamer-based application to pull raw video frames from PTP cameras
ii voxl-jpeg-turbo 2.1.3-5 arm64 libjpeg_turbo build for voxl
ii voxl-lepton-server 1.2.0 arm64 Application to interface with flir lepton camera
ii voxl-libgphoto2 0.0.4 arm64 Library to control digital cameras over USB
ii voxl-libuvc 1.0.7 arm64 cross-platform library for USB video devices
ii voxl-logger 0.3.5 arm64 misc tools for modal pipe architecture
ii voxl-mapper 0.2.0 arm64 voxl-mapper
ii voxl-mavcam-manager 0.5.3 arm64 ModalAI implementation of the Mavlink camera protocol
ii voxl-mavlink 0.1.1 arm64 mavlink headers
ii voxl-mavlink-server 1.3.2 arm64 MPA interface for mavlink over UART or UDP
ii voxl-modem 1.0.8 arm64 VOXL Modem Utils
ii voxl-mongoose 7.7.0-1 arm64 mongoose build for voxl
ii voxl-mpa-to-ros 0.3.7 arm64 ROSNode converting MPA pipes
ii voxl-mpa-tools 1.1.3 arm64 misc tools for modal pipe architecture
ii voxl-neopixel-manager 0.0.3 arm64 background service to manage neopixel LEDs
ii voxl-nlopt 2.5.0-4 arm64 nlopt
ii voxl-opencv 4.5.5-2 arm64 opencv built for VOXL
ii voxl-portal 0.6.3 arm64 Debug web interface for VOXL
ii voxl-px4 1.14.0-2.0.63 arm64 ModalAI PX4 flight controller
ii voxl-px4-imu-server 0.1.2 arm64 fetches imu data from PX4 running on QRB5165 DSP and publishes over MPA
ii voxl-px4-params 0.3.3 arm64 Tool to help configure px4-parameters
ii voxl-qvio-server 1.0.0 arm64 publishes QVIO data over named pipe interface
ii voxl-remote-id 0.0.9 arm64 Remote ID broadcasting tool
ii voxl-streamer 0.7.4 arm64 Gstreamer-based application to handle RTSP streaming
ii voxl-suite 1.1.3 arm64 voxl-suite for QRB5165
ii voxl-tag-detector 0.0.4 arm64 Detect apriltags for MPA
ii voxl-tflite-server 0.3.1 arm64 client of voxl-camera-server that does deep learning
ii voxl-utils 1.3.8 arm64 ModalAI common on-target utilities for VOXL
ii voxl-uvc-server 0.1.6 arm64 libuvc application to handle UVC camera frame output to MPA
ii voxl-vision-hub 1.7.3 arm64 main hub managing communication between VOXL MPA services and autopilots
ii voxl-voxblox 1.1.5 arm64 voxblox library api
ii voxl2-system-image 1.7.1-r0 arm64 Meta package that is used to track system image version for DEPENDS in debian packages
ii voxl2-wlan 1.0-r0 arm64 Packages for voxl2 that enable wifi dongle compatibility