Outdoor navigation problem
-
Hello,
We are from THI University and currently have seven drones that we intend to fly outdoors. However, we've encountered issues with drifting despite adjusting the parameters for outdoor conditions. The drones are unable to switch to position mode and only operate in altitude mode.
We are facing several problems:
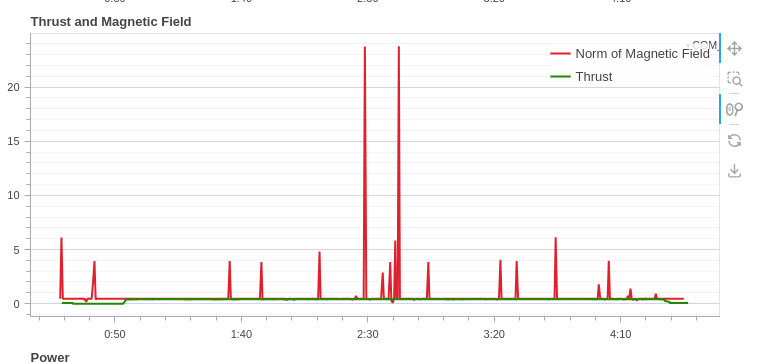
- The magnetometer (Mag) is not valid.
- When using VIO (Visual Inertial Odometry), we lose the VIO during yaw movements, and it cannot be reset.
- If we rely solely on outdoor parameters, the drones cannot fly because they do not switch to position mode.
- The drones vibrate; we have tuned the PID (Proportional Integral Derivative) settings, but the issue persists.
Please assist us in resolving these issues. We are uncertain why all seven drones are unable to operate effectively outdoors.
Drone Model: RB5
Hardware Version: M0052
VOXL-Suite Version: 1.1.2
PX4 Version: 1.14.0devThank you!
-
@Amin-Bassiri here is the log file:
https://review.px4.io/plot_app?log=c211415b-7b67-44e6-bf0b-ec5f963f5c85
-
@Amin-Bassiri Is it flying nicely in both manual and altitude hold modes? The first step is making sure those work well. For position mode I would start with GPS / Mag / Baro instead of VIO and make sure that works well. Then, after all of that seems to be working well, move on to VIO. For point #1, what do you mean that mag is not valid? For point #3, are you loading a specific parameters file? For example: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/EKF2_helpers/outdoor_gps_baro.params?ref_type=heads
-
@Eric-Katzfey Yes, manual and altitude modes work well,
- I started with GPS+Mag+baro but drones couldn't find the mag, sometimes finding the mag but suddenly losing it.
- I used VIO but sometimes lost the figures and lost the position.
- Yes, I loaded the specific parameters file for outdoor, and indoor, I tested all of them and checked all the scenarios, but drones outdoors can't fly in position mode without VIO, and with VIO is not stable.
When I turned on the Mag, I had an error: No valid data from Compass 0
-
@Amin-Bassiri I think the first thing is to figure out what has gone wrong with the mag. You need to get it flying nicely in position mode with GPS / Mag / baro first. VIO is trickier, especially outdoors. Since it relies on computer vision for it's tracking it can fail for quite a few different reasons and is more difficult to debug. VIO indoors where the environment can be controlled more closely is ideal. Outdoors VIO can be a lot more challenging and there will certainly be cases where VIO will fail. Outdoors it's probably best to use both GPS and VIO simultaneously and have PX4 fuse these measurements internally depending on the quality of each one at any particular time. Regardless, let's figure out what is going wrong with the mag first. Does the mag problem happen on all 7 drones? Are you able to calibrate the mag on any of them?
-
@Eric-Katzfey Yesterday I tested seven drones with outdoor parameters. One of them could fly in position mode, and another could fly in position mode but was drifting. The remaining five drones couldn't enter position mode.
The same drones, the same parameters, and the same environment, but different behaviour.
-
@Amin-Bassiri So, does the mag problem happen on all 7 drones?