@Amin-Bassiri here is the log file:
https://review.px4.io/plot_app?log=c211415b-7b67-44e6-bf0b-ec5f963f5c85
Hello,
We are from THI University and currently have seven drones that we intend to fly outdoors. However, we've encountered issues with drifting despite adjusting the parameters for outdoor conditions. The drones are unable to switch to position mode and only operate in altitude mode.
We are facing several problems:
Please assist us in resolving these issues. We are uncertain why all seven drones are unable to operate effectively outdoors.
Drone Model: RB5
Hardware Version: M0052
VOXL-Suite Version: 1.1.2
PX4 Version: 1.14.0dev
Thank you!
@tom Yes I'm using the latest SDK, also, my drone can not go to position mode in the outdoor, I changed the parameter for outdoor (px4 parameter), just when I used VIO can use position mode, but sometimes Vio lost the position, we have problem in outdoor navigation. we have 7 drones (RB5) in THI university all of them has same issue
@tom @Eric-Katzfey I have the same problem, did you fix it? if yes, how did you fix it?
@Moderator Thank you, as I understand you are using PID controller for the stability of the drone (RB5), I would like to use my control method, like (MPC, RL..), where should I go inside the drone?
Hello
I'm interested in diving into the development of the control system for the RB5 drone, or potentially even altering its existing control system. However, I'm uncertain about where to begin and how to proceed with this endeavor. If anyone has experience in this area or can offer guidance, I would greatly appreciate your input.
Specifically, I'm looking for information on:
Starting Point: Where should I begin my journey into understanding and potentially modifying the control system of the RB5 drone?
Modification Process: What steps are involved in altering the existing control system, and are there any resources or tools that could aid in this process?
Community or Resources: Are there any existing communities, forums, or online resources dedicated to the development or modification of drone control systems, particularly for the RB5 model?
Any advice, tips, or pointers you can provide would be immensely helpful as I embark on this project. Thank you in advance for your assistance!
Drone: RB5
hw version: M0052
voxl-suite: 1.1.2
PX4 Version: 1.14.0dev
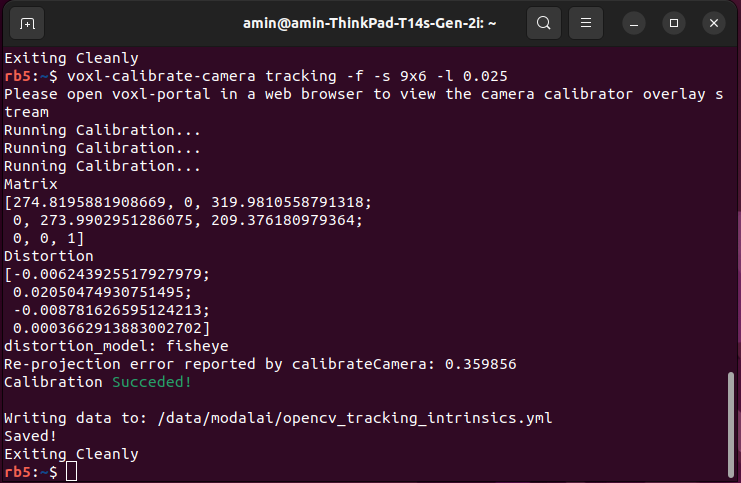
I calibrated the tarcking camera, and calibration was successful, but I got e-projection error reported by calibrateCamera.
What is the problem?
How can I solve it?
Drone: RB5
hw version: M0052
voxl-suite: 1.1.2
PX4 Version: 1.14.0dev
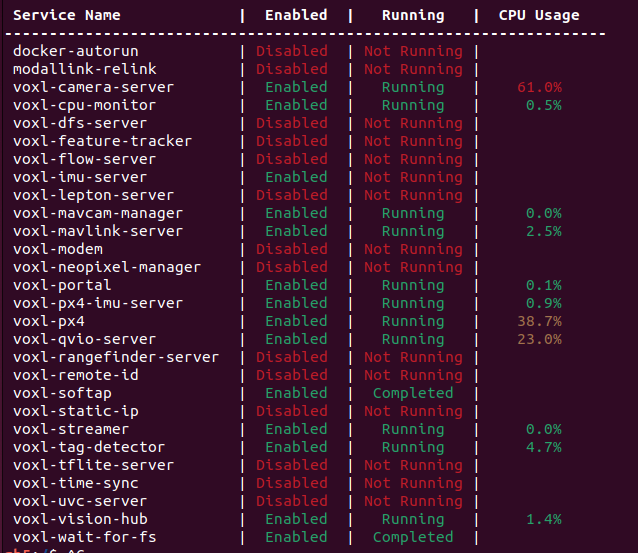
voxl Imu is not working,
I followed these commands
systemctl start voxl-imu-server
systemctl enable voxl-imu-server
but
voxl-imu-server Not Running
follow this
adb shell
sudo nano /etc/dhcpcd.conf
copy your ip in the page like this:
interface wlan0
static ip_address=192.168.1.35/24
static routers=192.168.1.7
static domain_name_servers=192.168.1.7
have look at this link also. https://www.makeuseof.com/raspberry-pi-set-static-ip/