Starling Hires camera extrinsics
-
@Alex-Kushleyev And how about the body frame's location? As per my measurements from the CAD for the translations of ToF and hires it should be at centroid of the drone, is it the same?
-
Yes coordinates wrt to body should be measured wrt to center of the drone with x=forward, y=right and z= down. So your camera will be in front (that is x will be positive).. and so on (similar how TOF translation works). It seems the body to tof translation for TOF above (0.1,0,0) is approximate based on numbers being exactly zero
")
-
You should get the translation from CAD between the center of the body (which can be estimated by an intersection of lines connecting two motor pairs) and the center of the hires camera module. You will get the 3 numbers and make sure you apply them correctly using the XYZ convention that the body uses (which may be different from the convention used in CAD viewer)
-
@Darshit-Desai said in Starling Hires camera extrinsics:
}, {
"parent": "body",
"child": "tof",
"T_child_wrt_parent": [0.068, -0.0116, -0.0168],
"RPY_parent_to_child": [0, 90, 180]Actually @Alex-Kushleyev you saw the wrong file, I later found this inisde voxlextrinsics conf in voxl2 starling its not exactly zero its some value. Based on that I measured using the coordinate convention you mentioned and figured that the centroid of the drone frame would be the origin of the body frame's coordinate axis
-
@Darshit-Desai OK, so is it clear now?
-
@Alex-Kushleyev said in Starling Hires camera extrinsics:
actually oriented vertically inside the front of the vehicle
What does this mean? Is it rotated somehow by 90 degrees along the z axis?
-
@Darshit-Desai , the TOF sensor looks like this https://www.modalai.com/products/voxl-dk-tof, it is shown in horizontal (normal) orientation. You can see in Starling that it is in vertial orientation (https://docs.modalai.com/starling-v2/)
-
@Alex-Kushleyev Oh yes now I got it thanks
-
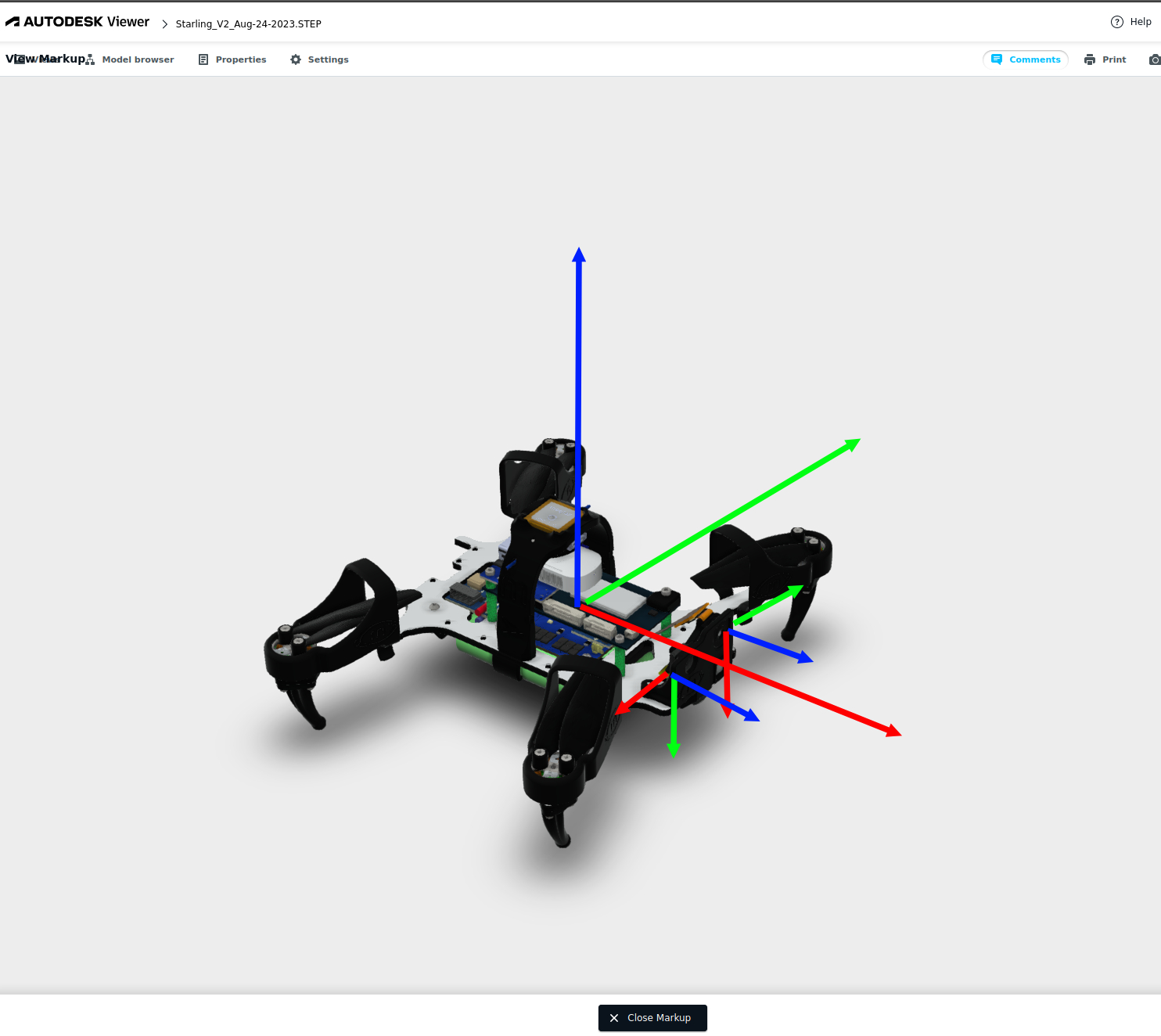
@Alex-Kushleyev just a sanity check for my understanding in the below markup I have considered MAVROS FLU (I've not considered the PX4 frame since I will be using mavros) frame as the reference frame and the rest of the tof and hires frames are shown below, is the tof frame represented correctly?
ToF frame is the smaller axes i.e., one on the top right side and hires is on the bottom left
-
@Darshit-Desai , yes i believe you are showing the TOF and Hires camera local frames correctly.
As for the vehicle, the convention we normally use is FRD, but since you mentioned that you are assuming FLU in your case, that also looks correct.