Posts made by leonardo Andrade 0
-
RE: VOXL2 - HITL/VIOposted in Ask your questions right here!
Hi Eric, this is my first time doing any setup with HITL.
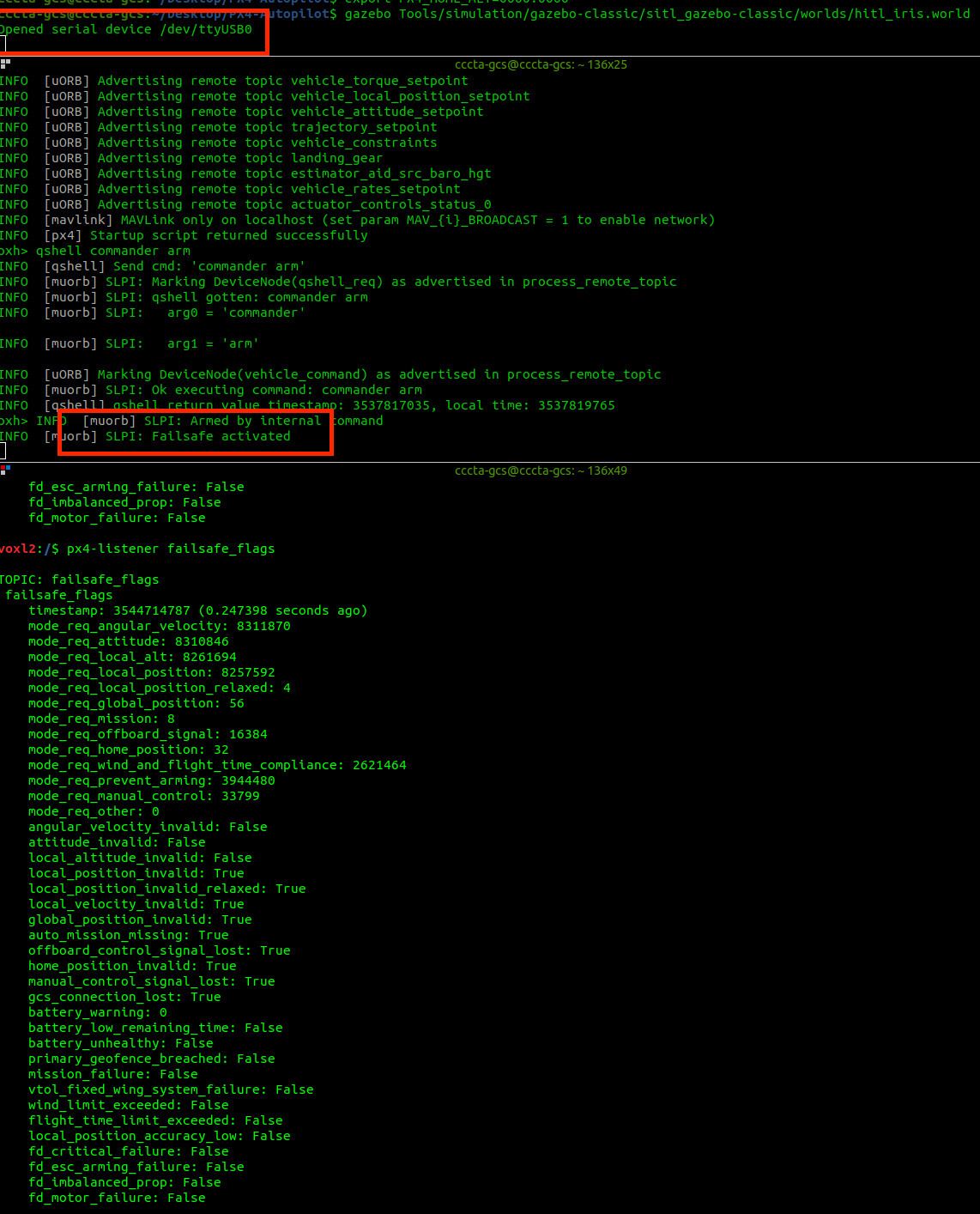
I'm using the standard voxl-px4-hitl-start file, on the host computer it apparently opens communication with the usb, I send the command to arm the drone and when I tried the first time, it still tookoff, without showing any stability, now it triggers the failsafe and doesn't even takeoff.
Do you have any suggestions as to how I could approach it better? As it's my first time, I'm a bit lost as to how to debug in this case.
ps: I'm not using GPS
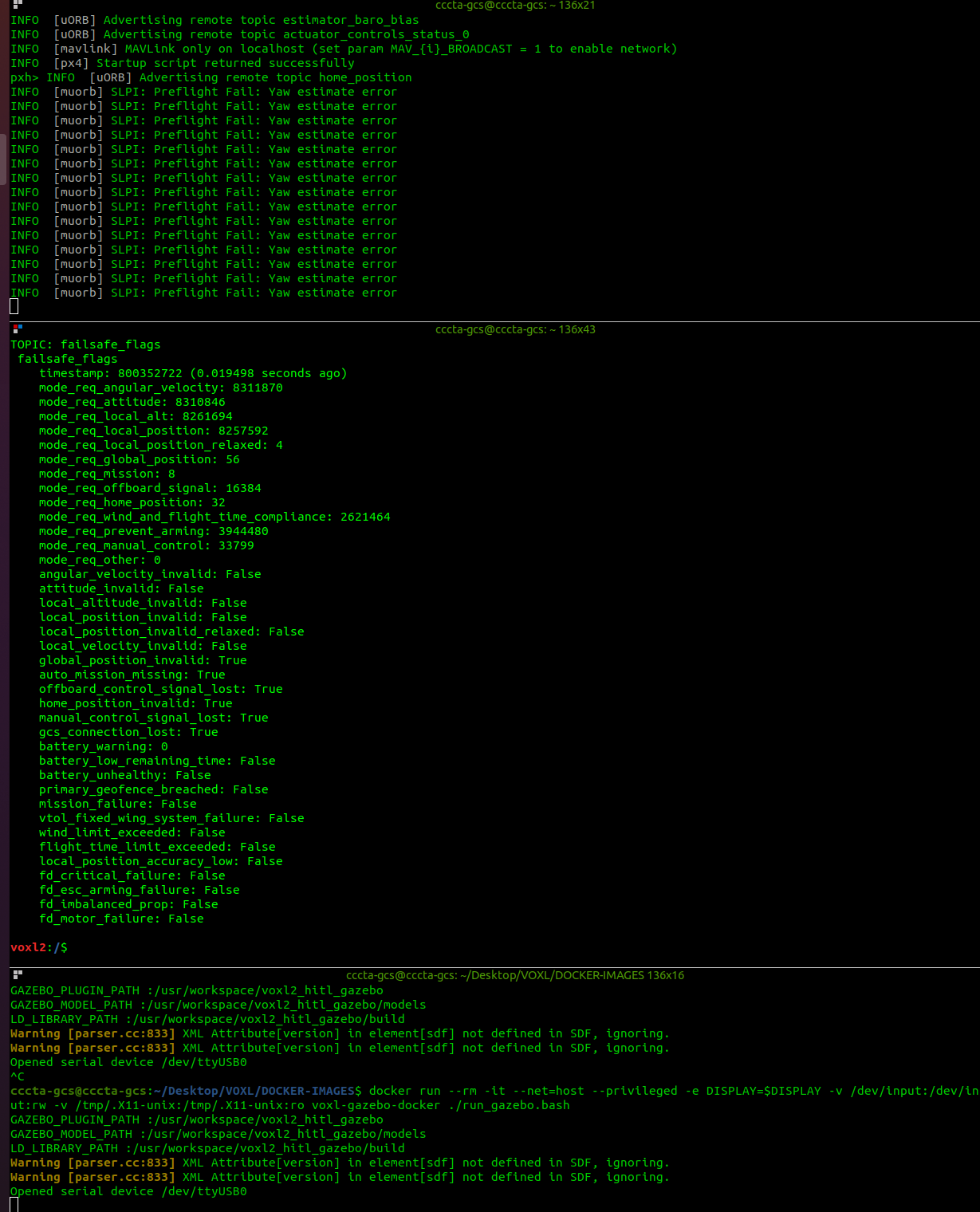
voxl-px4-hitl-start

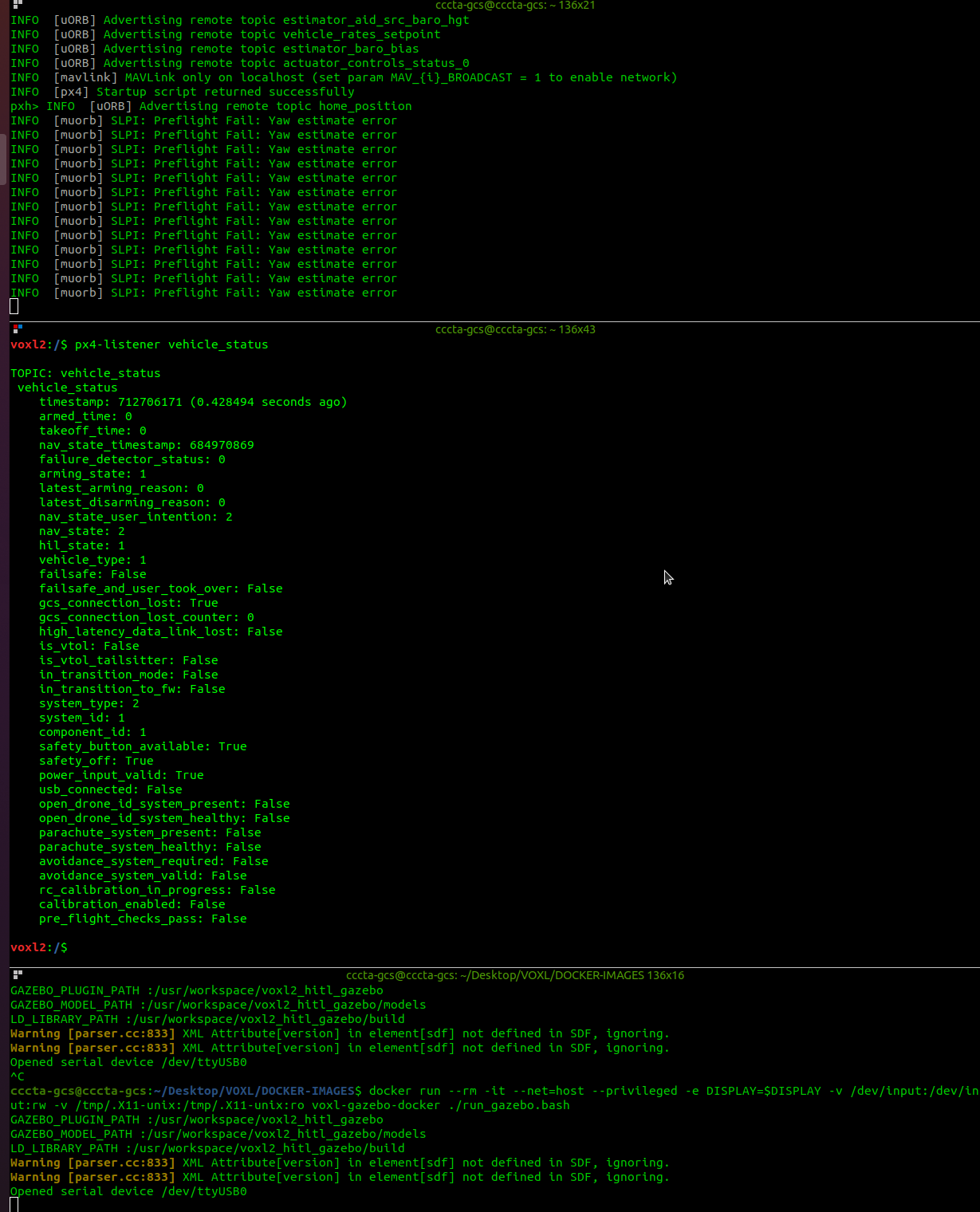
During the execution of voxl-px4-hitl
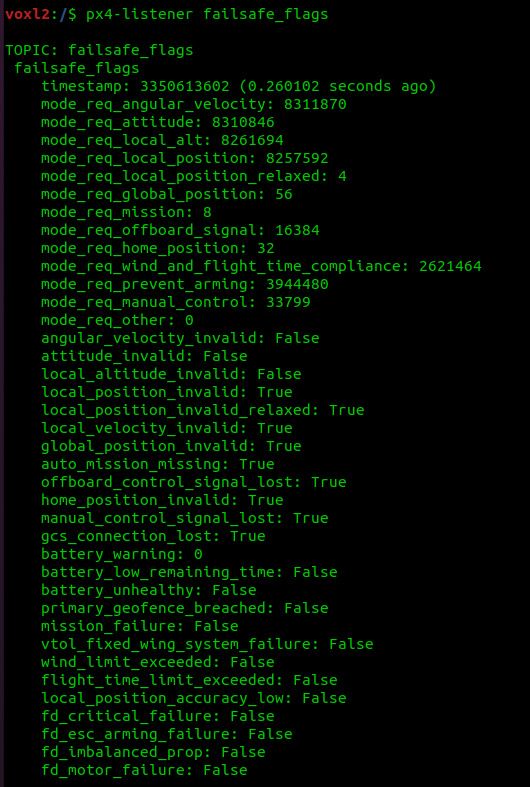
Failsafe triggered
-
RE: VOXL2 - HITL/VIOposted in Ask your questions right here!
@Eric-Katzfey said in VOXL2 - HITL/VIO:
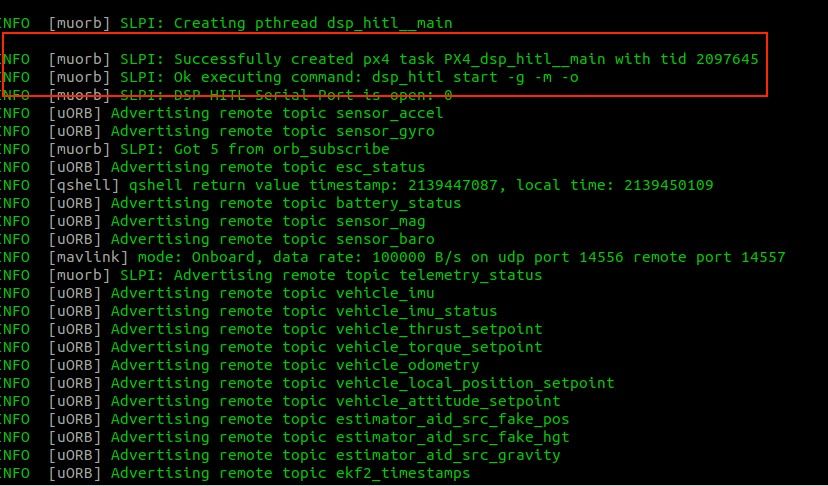
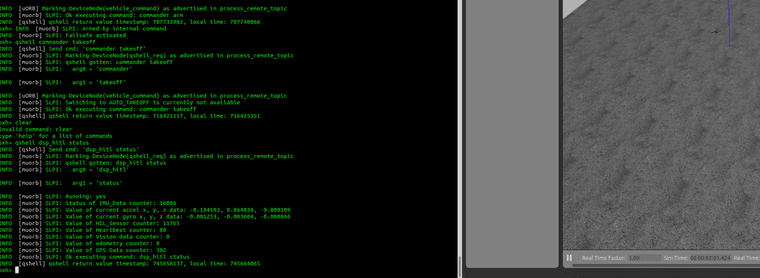
qshell dsp_hitl status
I runned the command , but seems it's ok.What could I check? What do you suggest?@Eric-Katzfey
-
VOXL2 - HITL/VIOposted in Ask your questions right here!
Hey guys !
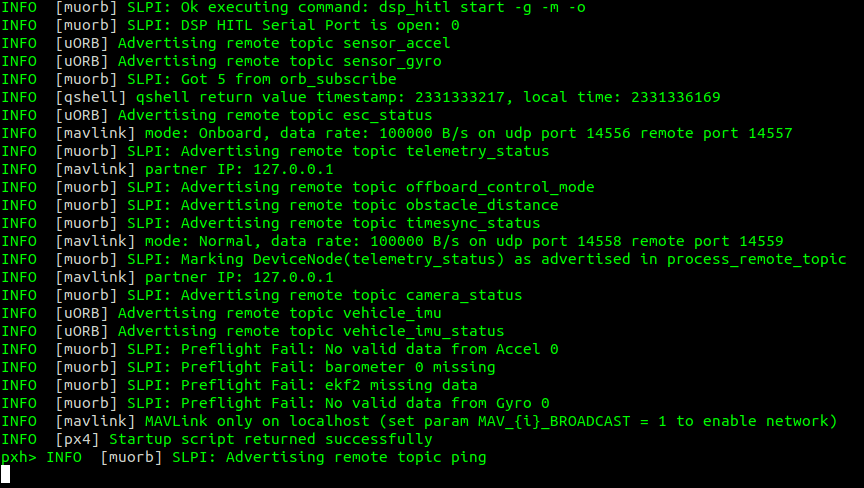
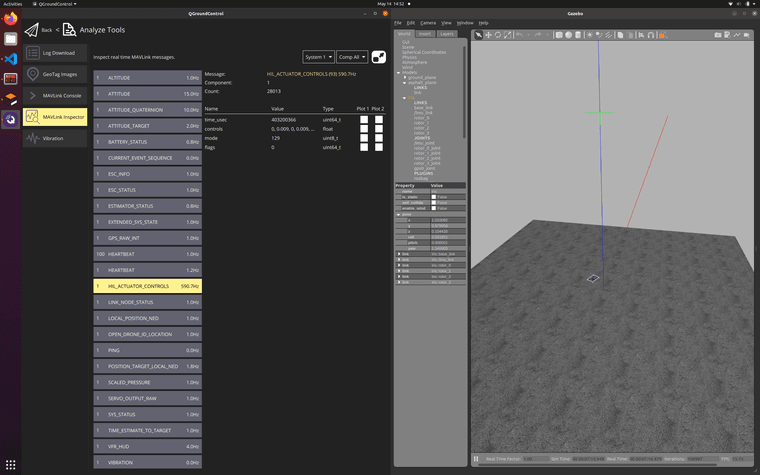
I want to run PX4-HITL using VIO, but I'm running into some problems.
I was able to create the communication with the FTDI cable, but using the docker image or using gazebo on my computer I had problems with the pre-flights checks.
I also had problems with QGC, which kept alerting me to an unknown mode-
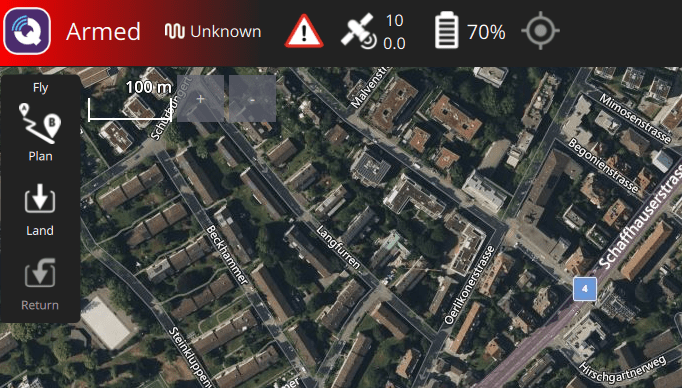
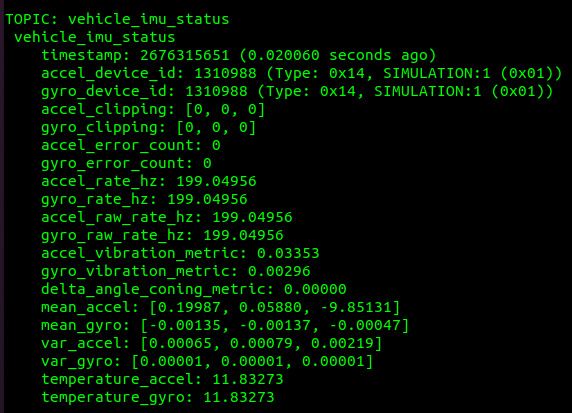
The data presented was strange
The version of the sdk and packages are:
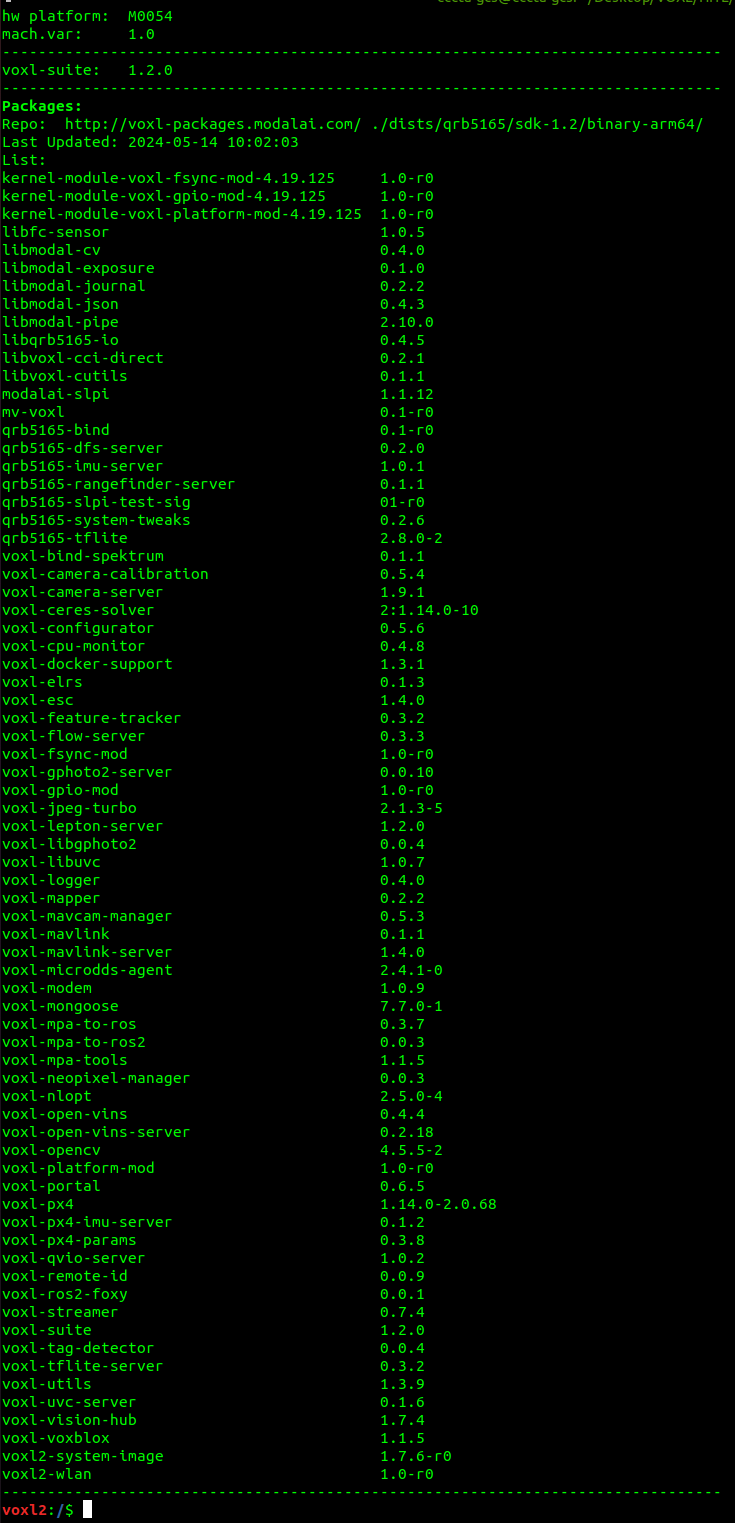
I used as reference :
https://docs.modalai.com/voxl2-PX4-hitl/I would like to know if there are any additional steps for the parameters with VIO and what would be the correct way to execute VOXL-PX4-HITL.
-
RE: ODOMETRY MESSAGEposted in Ask your questions right here!
@Eric-Katzfey thanks mate for your answer!
-
ODOMETRY MESSAGEposted in Ask your questions right here!
I'm missing the odometry message (ID 331) in QGC after updating the system to version 1.1.3.
I loaded the parameters (Indoor VIO Missing GPS) :
However, when I use the voxl-inspect-qvio service (and take measurements with markings on the ground, the coordinates are correct/within tolerance).
When I call the service:
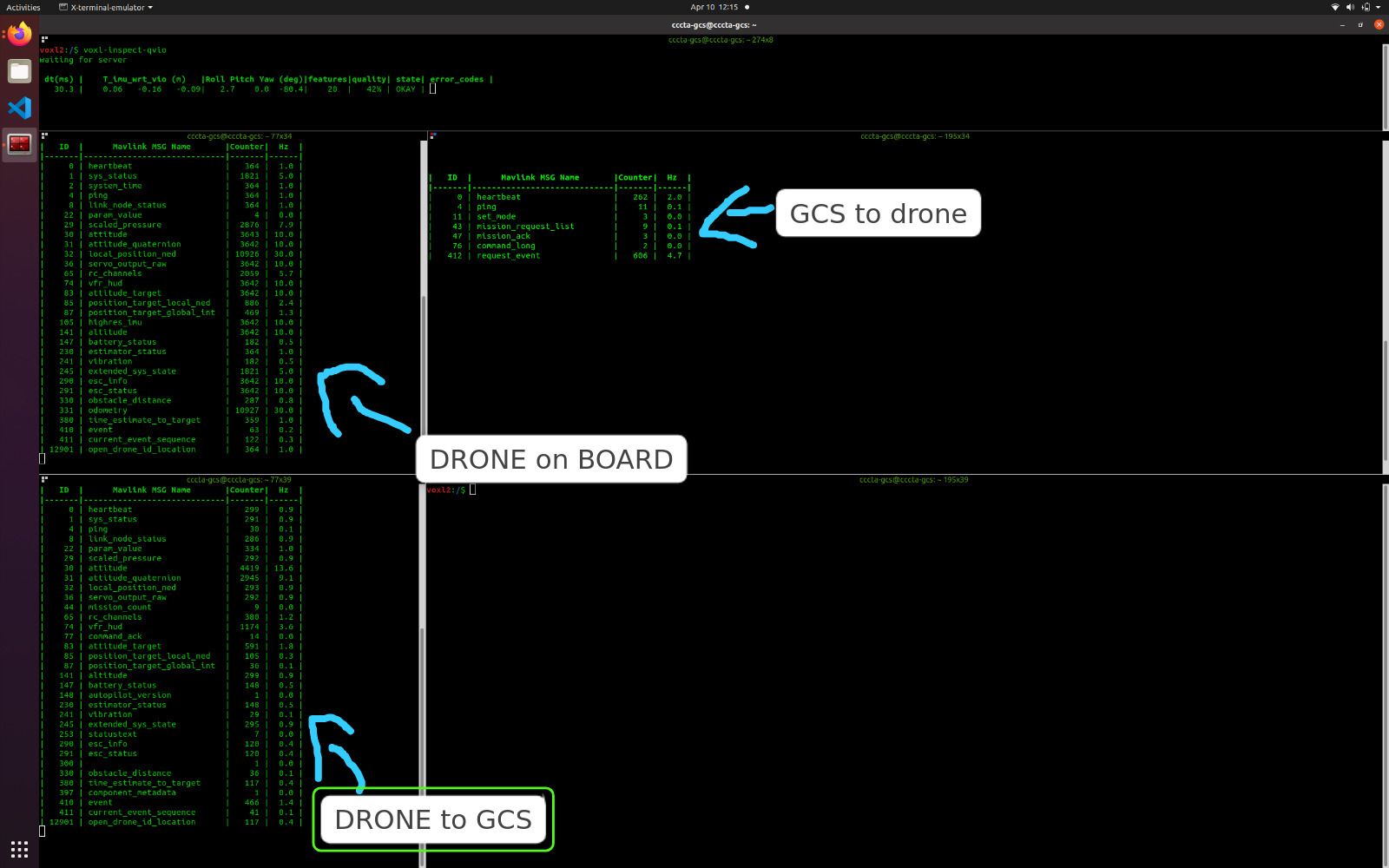
voxl-inspect-mavlink mavlink_onboardThe odometry message is there, but when I call
voxl-inspect-mavlink mavlink_to_gcs
Which of course reflects what is appearing in QGC (there is no odometry message, only local_position_ned).
So we're not supposed to have the odometry message in these new versions? Mainly because the PX4 v1.14 firmware no longer supports the EKF2_AID_MASK parameters, among others.
I really want to answer this question, especially to find out if I can fly autonomously.
-
RE: UART communication using J19 - VOXL2 SENTINELposted in Ask your questions right here!
Hi Alex,
When I tested was with the px4 running.
That apps you said is like this?
https://docs.px4.io/main/en/modules/hello_sky.htmlI’m still learning some parts of px4 itself
 .
.Ideally, I thought to connect the esp to cpu where I could to read the data coming , such as to connect a arduino board in a computer. However to control the gimbal should be using mavlink .
It’s like to learn to use the peripherals of my sentinel, because in the future I need also to connect UART lidar.
What do you recommend? Because the others UARTs ports that I have are full right now.
Best regards!
-
UART communication using J19 - VOXL2 SENTINELposted in Ask your questions right here!
hi guys!
I have a very dumb question.
I'd like to develop a gimbal using uart communication. But since I'd already removed the GPS module, I thought I'd use these uart ports.
I tried connecting an ESP32 to J19 of the VOXL2 (PINOS: #2-TX, #3-RX, #6-GND) and checking communication using the qrb5165io-uart-test and qrb5165io-slpi-uart-test commands.
I also checked this link:
https://docs.modalai.com/voxl2-qups/
Could you please guide me?!
Thank you! -
LAND by RC SPEKTRUM DX6posted in Ask your questions right here!
Hi guys,
I would like to know if it is possible to assign an switch to my RC Spektrum DX6 to land the Sentinel drone.
Best Regards,
Leonardo Andrade.
-
VIO Algorithmsposted in GPS-denied Navigation (VIO)
Good Morning guys,
I would like to know how could I test my own VIO algorithms on sentinel drone.
Best Regards!
-
List of commands to JParser - VOXL Portalposted in Ask your questions right here!
Hello everyone!
I'm trying to get information and spin engines, like a checklist for the drone's verification to maintenance from VOXL-PORTAL.
So, i was reading the js file called "JParser" and others html files, I would like to know where can find the request messages
var parser = new jParser(msg, { msg_type: { index: 'uint8', }, status_text_msg: { status_text: ['array', 'char', 127], }, fm_msg: { armed: 'uint8', num_sats: 'uint8', base_mode: 'uint8', custom_mode: 'uint32', batt_remaining: 'uint8', }});As shown above the "fm_msg" and "status_text_msg" are the messages, but where can I find this list or how can I request it to controller?
thanks for all!
-
RE: Limits of VOXL-Portalposted in Ask your questions right here!
@Eric-Katzfey , I was trying to develop a test platform, to spin the motors and monitoring others variables. Is it not possible right now?
-
Limits of VOXL-Portalposted in Ask your questions right here!
Hey guys,
I was looking for the voxl-portal and I started to think if is possible to send commands MAVLINK/PX4 or parts of the QGC duty be transferred to there.
Someone can leave me clear, please

Thanks