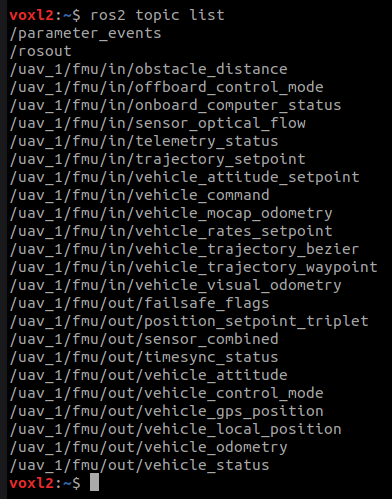
Hi @Eric-Katzfey that worked, now I actually want to export a variable which states the namespace of the relevant drone and the voxl-px4-start file picks up that variable and assigns the namespace but I am facing some errors because of that, could you have a look
Here's my bashrc file
#!/bin/bash
# ModalAI default bashrc file
#VERSION 1.2
# If not running interactively, don't do anything
case $- in
*i*) ;;
*) return;;
esac
# don't put duplicate lines or lines starting with space in the history.
# See bash(1) for more options
HISTCONTROL=ignoreboth
# append to the history file, don't overwrite it
shopt -s histappend
# for setting history length see HISTSIZE and HISTFILESIZE in bash(1)
HISTSIZE=1000
HISTFILESIZE=2000
# check the window size after each command and, if necessary,
# update the values of LINES and COLUMNS.
shopt -s checkwinsize
# ubuntu ssh sets TERM to xterm-256color which screws with ROS
# change it to linux spec
export TERM=linux
if [ -d /home/root/.profile.d/ ]; then
for i in /home/root/.profile.d/* ; do
if [ -d $i ]; then
for j in $i/* ; do
if [ -f $j ]; then
. $j
fi
done
else
. $i
fi
done
fi
# Put user-specific tweaks here or in a file in ~/.profile.d/
export PX4_NAMESPACE="uav_1"
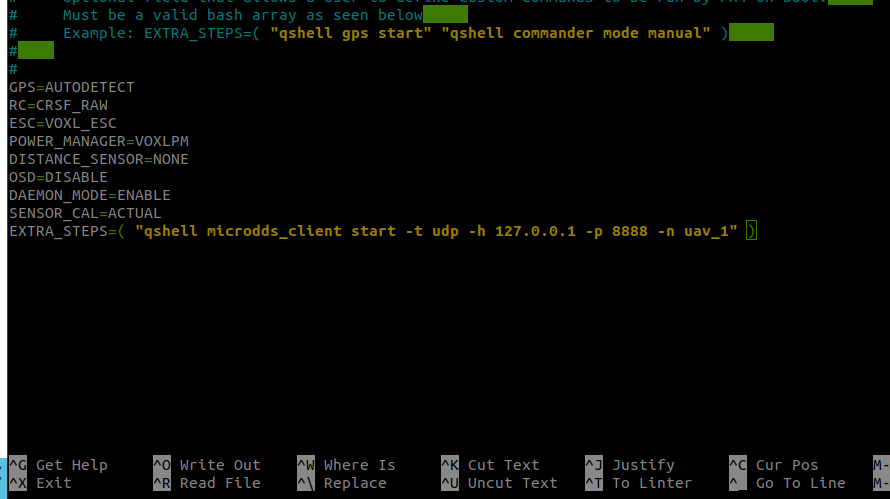
Here's my voxl-px4-start file
#!/bin/sh
# PX4 commands need the 'px4-' prefix in bash.
# (px4-alias.sh is expected to be in the PATH)
. px4-alias.sh
echo -e "\n*************************"
echo "GPS: $GPS"
echo "RC: $RC"
echo "ESC: $ESC"
echo "POWER MANAGER: $POWER_MANAGER"
echo "DISTANCE SENSOR: $DISTANCE_SENSOR"
echo "OSD: $OSD"
echo "EXTRA STEPS:"
for i in "${EXTRA_STEPS[@]}"
do
echo -e "\t$i"
done
echo -e "*************************\n"
# In order to just exit after starting the uorb / muorb modules define
# the environment variable MINIMAL_PX4. (e.g. export MINIMAL_PX4=1)
# This is useful for testing / debug where you may want to start drivers
# and modules manually from the px4 command shell
if [ ! -z $MINIMAL_PX4 ]; then
/bin/echo "Running minimal script"
exit 0
fi
# Figure out what platform we are running on.
PLATFORM=`/usr/bin/voxl-platform 2> /dev/null`
RETURNCODE=$?
if [ $RETURNCODE -ne 0 ]; then
# If we couldn't get the platform from the voxl-platform utility then check
# /etc/version to see if there is an M0052 substring in the version string. If so,
# then we assume that we are on M0052.
VERSIONSTRING=$(</etc/version)
M0052SUBSTRING="M0052"
if [[ "$VERSIONSTRING" == *"$M0052SUBSTRING"* ]]; then
PLATFORM="M0052"
fi
fi
# We can only run on M0052, M0054, or M0104 so exit with error if that is not the case
if [ $PLATFORM = "M0052" ]; then
/bin/echo "Running on M0052"
elif [ $PLATFORM = "M0054" ]; then
/bin/echo "Running on M0054"
elif [ $PLATFORM = "M0104" ]; then
/bin/echo "Running on M0104"
else
/bin/echo "Error, cannot determine platform!"
exit 0
fi
# Sleep a little here. A lot happens when the uorb and muorb start
# and we need to make sure that it all completes successfully to avoid
# any possible race conditions.
/bin/sleep 1
param select /data/px4/param/parameters
# Load in all of the parameters that have been saved in the file
param load
# Start logging and use timestamps for log files when possible.
# Add the "-e" option to start logging immediately. Default is
# to log only when armed. Caution must be used with the "-e" option
# because if power is removed without stopping the logger gracefully then
# the log file may be corrupted.
logger start -t
# IMU (accelerometer / gyroscope)
if [ "$PLATFORM" == "M0104" ]; then
/bin/echo "Starting IMU driver with rotation 12"
qshell icm42688p start -s -R 12
else
/bin/echo "Starting IMU driver with no rotation"
qshell icm42688p start -s
fi
# Start Invensense ICP 101xx barometer built on to VOXL 2
qshell icp101xx start -I -b 5
# Auto detect the magnetometer. If one or both of these devices
# are not connected it will fail but not cause any harm.
/bin/echo "Looking for qmc5883l magnetometer"
qshell qmc5883l start -R 10 -X -b 1
/bin/echo "Looking for ist8310 magnetometer"
qshell ist8310 start -R 10 -X -b 1
# GPS and magnetometer
if [ "$GPS" != "NONE" ]; then
# On M0052 the GPS driver runs on the apps processor
if [ $PLATFORM = "M0052" ]; then
gps start -d /dev/ttyHS2
# On M0054 and M0104 the GPS driver runs on SLPI DSP
else
qshell gps start
fi
fi
# Auto detect an ncp5623c i2c RGB LED. If one isn't connected this will
# fail but not cause any harm.
/bin/echo "Looking for ncp5623c RGB LED"
qshell rgbled_ncp5623c start -X -b 1 -f 400 -a 56
# We do not change the value of SYS_AUTOCONFIG but if it does not
# show up as used then it is not reported to QGC and we get a
# missing parameter error.
param touch SYS_AUTOCONFIG
# ESC driver
if [ "$ESC" == "VOXL_ESC" ]; then
/bin/echo "Starting VOXL ESC driver"
qshell voxl_esc start
elif [ "$ESC" == "VOXL2_IO_PWM_ESC" ]; then
if [ "$RC" == "M0065_SBUS" ]; then
/bin/echo "Starting VOXL IO for PWM ESC with SBUS RC"
qshell voxl2_io start
else
/bin/echo "Starting VOXL IO for PWM ESC without SBUS RC"
qshell voxl2_io start -e
fi
else
/bin/echo "No ESC type specified, not starting an ESC driver"
fi
# RC driver
if [ "$RC" == "FAKE_RC_INPUT" ]; then
/bin/echo "Starting fake RC driver"
qshell rc_controller start
elif [ "$RC" == "CRSF_RAW" ]; then
/bin/echo "Starting CRSF RC driver"
qshell crsf_rc start -d 7
elif [ "$RC" == "CRSF_MAV" ]; then
/bin/echo "Starting TBS crossfire RC - MAV Mode"
qshell mavlink_rc_in start -m -p 7 -b 115200
elif [ "$RC" == "SPEKTRUM" ]; then
/bin/echo "Starting Spektrum RC"
# On M0052 the RC driver runs on the apps processor
if [ $PLATFORM = "M0052" ]; then
rc_input start -d /dev/ttyHS1
# On M0054 and M0104 the RC driver runs on SLPI DSP
else
qshell spektrum_rc start
fi
elif [ "$RC" == "GHST" ]; then
/bin/echo "Starting GHST RC driver"
qshell ghst_rc start -d 7
elif [ "$RC" == "M0065_SBUS" ]; then
if [ $PLATFORM = "M0052" ]; then
apps_sbus start
elif [ "$ESC" != "VOXL2_IO_PWM_ESC" ]; then
/bin/echo "Attempting to start M0065 SBUS RC driver for original M0065 FW"
qshell dsp_sbus start
retVal=$?
if [ $retVal -ne 0 ]; then
/bin/echo "Starting M0065 SBUS RC driver for original M0065 FW failed"
/bin/echo "Attempting to start M0065 SBUS RC driver for new M0065 FW"
qshell voxl2_io start -d -p 7
fi
else
/bin/echo "M0065 SBUS RC driver already started with PWM ESC start"
fi
fi
if [ "$DISTANCE_SENSOR" == "LIGHTWARE_SF000" ]; then
# Make sure to set the parameter SENS_EN_SF0X to 8 for sf000/b sensor
qshell lightware_laser_serial start -d 7
fi
if [ "$POWER_MANAGER" == "VOXLPM" ]; then
# APM power monitor
qshell voxlpm start -X -b 2
fi
# Optional distance sensor on spare i2c
# qshell vl53l0x start -X -b 4
# qshell vl53l1x start -X -b 4
# Start all of the processing modules on DSP
qshell sensors start
qshell ekf2 start
qshell mc_pos_control start
qshell mc_att_control start
qshell mc_rate_control start
qshell mc_hover_thrust_estimator start
qshell mc_autotune_attitude_control start
qshell land_detector start multicopter
qshell manual_control start
qshell control_allocator start
qshell load_mon start
# Only start the rc_update module if an actual RC driver
# is publishing input_rc topics. Otherwise for external RC
# over Mavlink this isn't needed.
if [ "$RC" != "EXTERNAL" ]; then
qshell rc_update start
fi
qshell commander start
# This is needed for altitude and position hold modes
qshell flight_mode_manager start
# Start all of the processing modules on the applications processor
dataman start
navigator start
load_mon start
# This bridge allows raw data packets to be sent over UART to the ESC
modal_io_bridge start
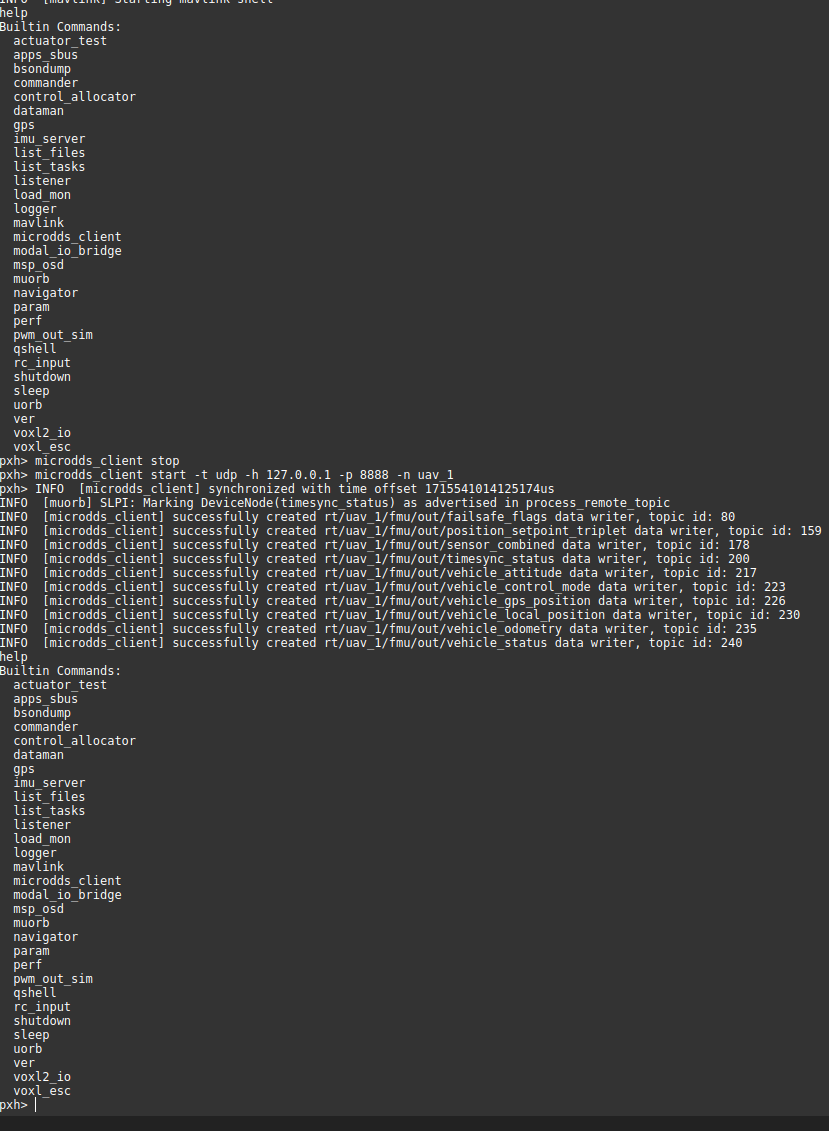
# Start microdds_client for ros2 offboard messages from agent over localhost
microdds_client start -t udp -h 127.0.0.1 -p 8888 -n $PX4_NAMESPACE
# On M0052 there is only one IMU. So, PX4 needs to
# publish IMU samples externally for VIO to use.
if [ $PLATFORM = "M0052" ]; then
imu_server start
fi
# start the onboard fast link to connect to voxl-mavlink-server
mavlink start -x -u 14556 -o 14557 -r 100000 -n lo -m onboard
# slow down some of the fastest streams
mavlink stream -u 14556 -s HIGHRES_IMU -r 10
mavlink stream -u 14556 -s ATTITUDE -r 10
mavlink stream -u 14556 -s ATTITUDE_QUATERNION -r 10
mavlink stream -u 14556 -s GLOBAL_POSITION_INT -r 30
mavlink stream -u 14556 -s SCALED_PRESSURE -r 10
# start the slow normal mode for voxl-mavlink-server to forward to GCS
mavlink start -x -u 14558 -o 14559 -r 100000 -n lo
mavlink boot_complete
# Optional MSP OSD driver for DJI goggles
# This is only supported on M0054 (with M0125 accessory board)
if [ "$OSD" == "ENABLE" ]; then
/bin/echo "Starting OSD driver"
msp_osd start -d /dev/ttyHS1
fi
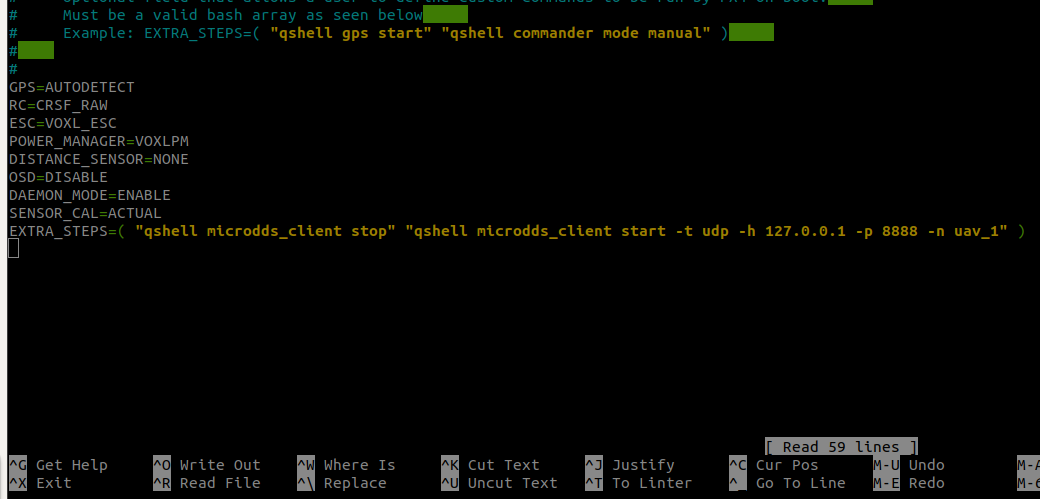
# Start optional EXTRA_STEPS
for i in "${EXTRA_STEPS[@]}"
do
$i
done
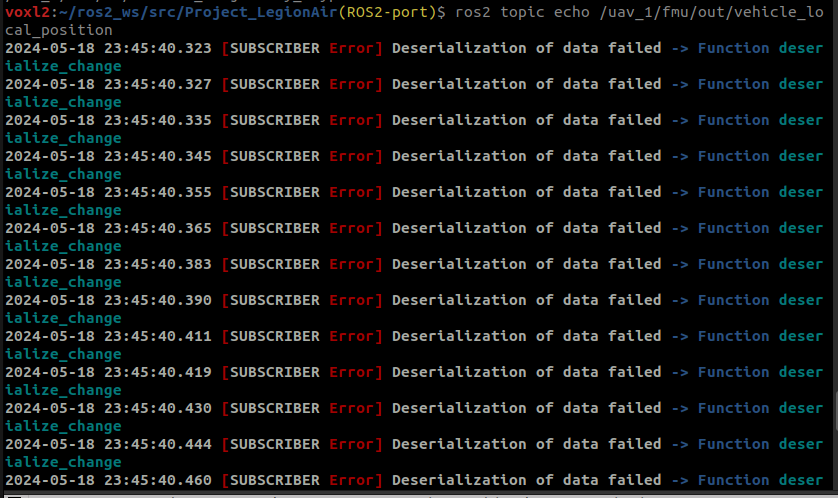
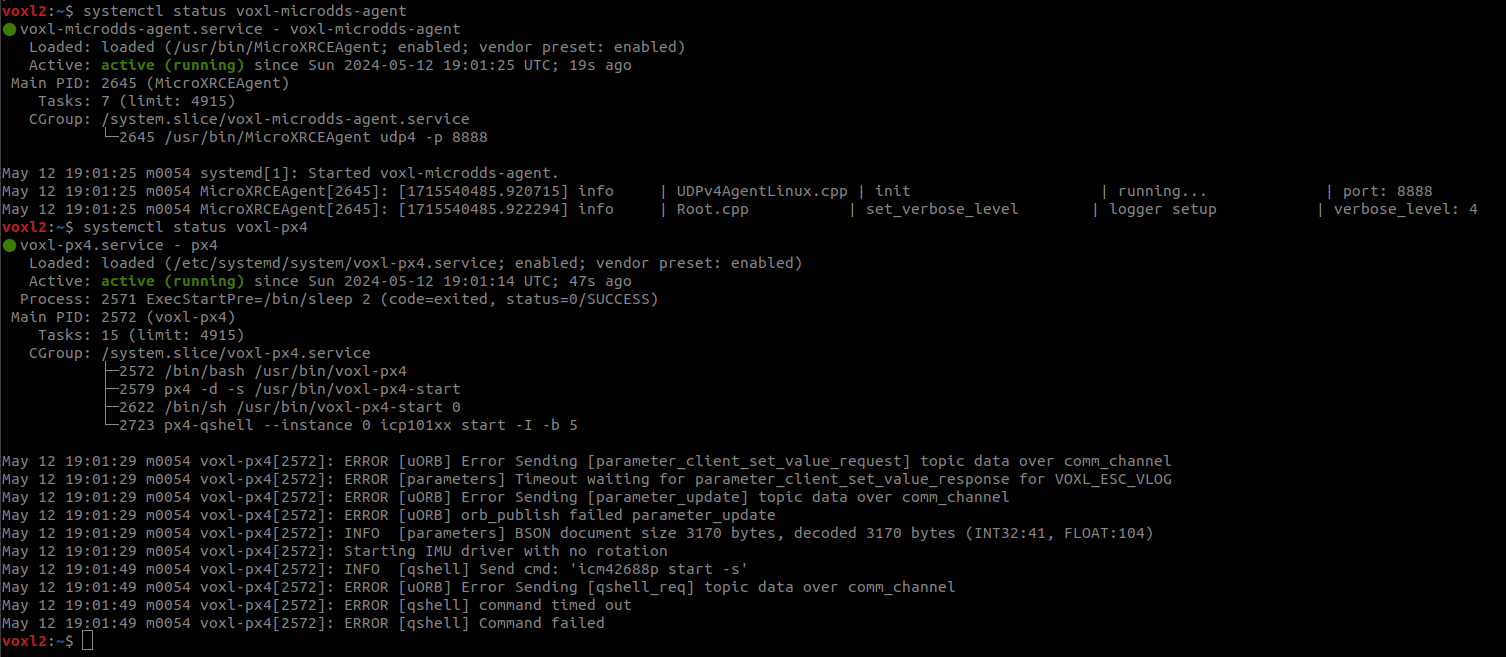
The errors that I get: