@maxwelllwang Sorry here is a working link to the log. https://review.px4.io/plot_app?log=270f405a-88bd-4ba7-a4d2-a4eb3258e18d
M
Posts made by maxwelllwang
-
RE: Failsafe enabled: no local positionposted in Flight Core
-
Failsafe enabled: no local positionposted in Flight Core
I am using v1.11.3-0.2.3 modalai voxl build of PX4 and a modalai flight core using a holybro m8 gps
I have done all calibration multiple times and it flies great in sabilized modehowever when I try to fly in position mode or use Takeoff flight mode, it throws the error Failsafe enabled no local position.
Conditions for recreation
It usually happens right after arming around 5 seconds. but sometimes mid flight
After reflashing firmware issue doesn't show up until around 5 minutes of the drone being on. But after first occurance happens after every arm
Tested with two different holybro m8 gps and two different gps cables
voxl-vision-px4 has vio turned off.here is what i see on qgroundcontrol
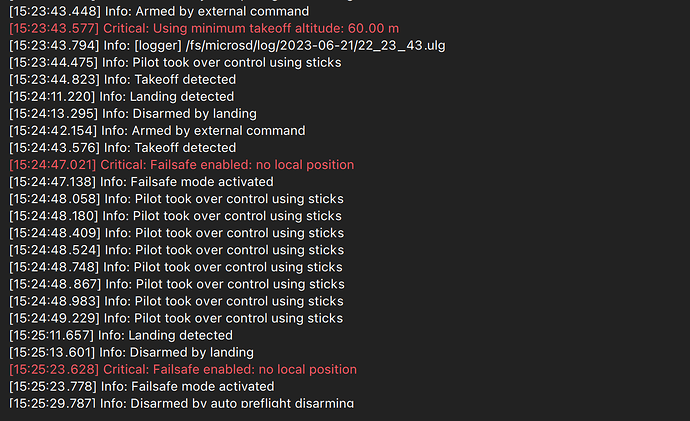
here is the corrosponding error message i get on my logs
WARN [gps] Tracking satellite has disappeared from horizon for unknown reason–please check location! 194 66Here is the link to my log
https://review.px4.io/plot_app?log=270f405a-88bd-4ba7-a4d2-a4eb3258e18dhttps://discuss.px4.io/uploads/default/original/2X/f/fb421bd9f5516857db03f18eec8cdbf50c6f43f3.png -
Duplicating UVC cameraposted in Software Development
We are using a USB webcam plugged in to the USB port on the modem. Currently we can access the webcam from within a docker image as a USB device. But now we want to use this same camera feed for two separate docker images/ processes. so,
How to duplicate video feed / USB device on Voxl?
Existing methods use
v4l2loopbackto generate duplicate video streams, however the default yocto distribution does not contain the kernel modules necessary to run v4l2
How would I duplicate video stream without using a custom kernelAsked this question before in a different channel but wanted to see if anyone has experience with this
{kind=link}